Hi everyone,
I'm trying to get UART communication working between an Arduino and a TMC2209 stepper driver, but I can't seem to make it work.
Here’s how I’ve connected the pins:
- PDN_UART is connected directly to Arduino RX (pin 5), and to TX (pin 6) through a 1k resistor
- EN -> pin 7
- STEP -> pin 4
- DIR -> pin 3
- MS1 and MS2 are left unconnected
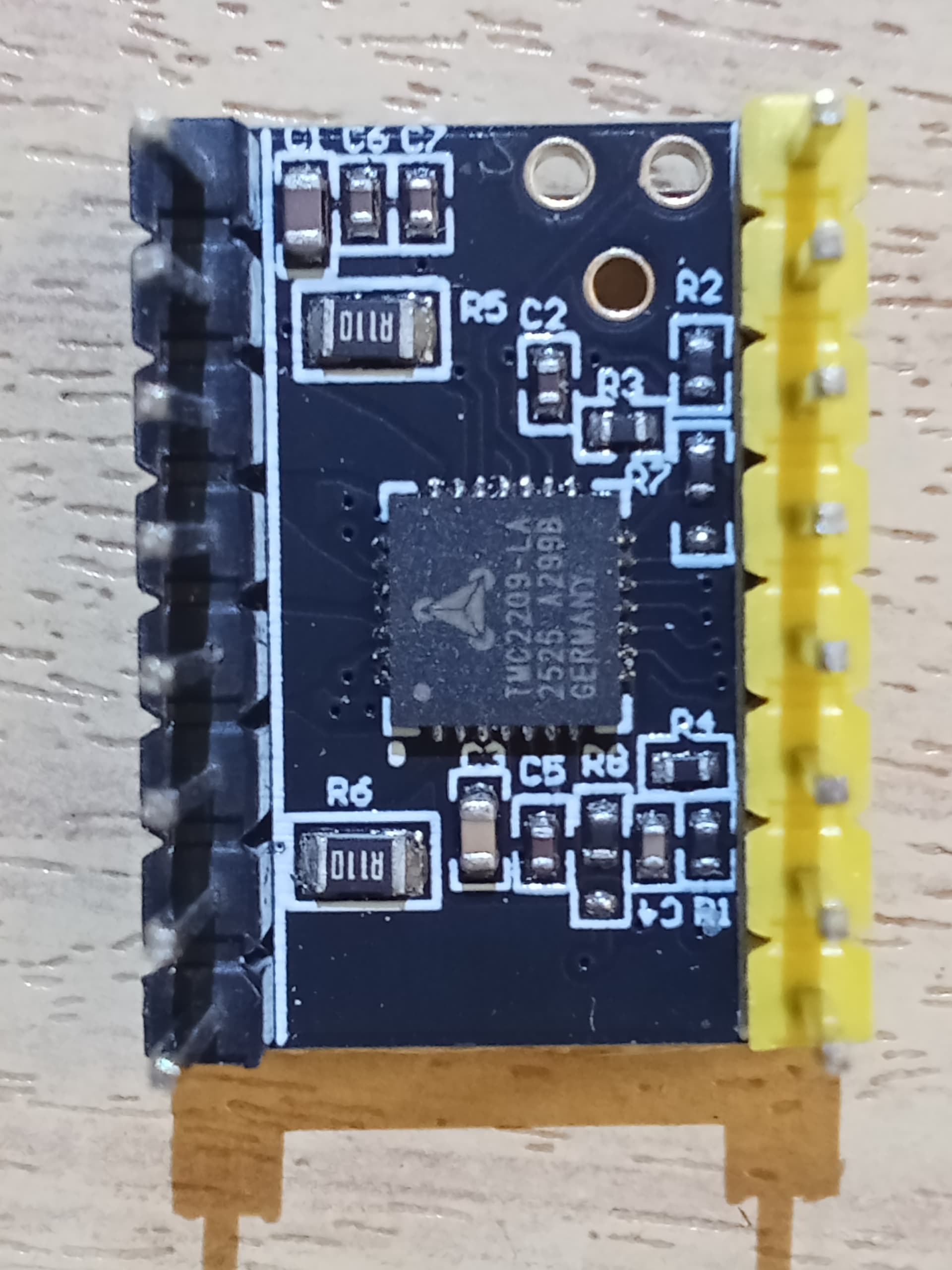
I'm starting to suspect the issue might be with the driver module itself. So first, I’m attaching a couple of photos of the module, including a close-up of the PDN_UART pin under a microscope:
photos:



Below is the code I’m currently using. In this setup, I’m working with a custom PCB that has the driver soldered directly on it, along with an OLED screen and an ATmega328P.
Sorry if the code seems a bit messy — I’ve split it across several files to try and keep things organized.
main.ino:
#include <TMCStepper.h>
#include <Wire.h>
#include <Adafruit_SSD1306.h>
#include <SoftwareSerial.h>
// altre schede
#include "oled_display.h"
#include "motor_control.h"
#include "config.h"
#define TMC_RX_PIN 6 // Arduino TX -> TMC RX (tramite resistenza 1Kohm)
#define TMC_TX_PIN 5 // Arduino RX <- TMC TX
// OLED
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
// Setup SoftwareSerial (Rx, Tx)
SoftwareSerial tmcs(TMC_TX_PIN, TMC_RX_PIN); // RX, TX
#define R_SENSE 0.11f
TMC2209Stepper driver(&tmcs, R_SENSE, 0x00); // Aggiunto indirizzo 0x00
void setup() {
pinMode(EN_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(BUTTON_PIN, INPUT_PULLUP);
pinMode(LED_PIN, OUTPUT);
pinMode(TMC_RX_PIN, INPUT);
pinMode(TMC_TX_PIN, OUTPUT);
digitalWrite(EN_PIN, LOW); // Enable driver
// OLED init
setupOLED(); // Inizializza il display una sola volta
// Setup SoftwareSerial UART a 115200
tmcs.begin(19200); // test 19200 prima di tornare a 115200
delay(100);
driver.begin();
driver.toff(5);
driver.rms_current(600);
driver.en_spreadCycle(false);
driver.pwm_autoscale(true);
driver.microsteps(1);
}
unsigned long currentMillis;
unsigned long previousMillis = 0;
unsigned long oledPreviousMillis = 0; //--
const long interval = 500; // 500 ms led lampeggiante
bool ledState = false;
bool buttonPressed = false;
void loop() {
currentMillis = millis();
// LED blink
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
ledState = !ledState;
digitalWrite(LED_PIN, ledState);
}
// Aggiorna display
if (currentMillis - oledPreviousMillis >= 300) {
oledPreviousMillis = currentMillis;
driver.microsteps(1);
uint16_t currentMicrosteps = driver.microsteps(); // LEGGE valore dal driver
updateOLED(currentMicrosteps);
}
// Pulsante
if (digitalRead(BUTTON_PIN) == LOW && !buttonPressed) {
buttonPressed = true;
startMoveSteps(NUM_STEPS);
}
if (digitalRead(BUTTON_PIN) == HIGH) {
buttonPressed = false;
}
// Gestione motore
updateMotor();
}
config.h:
#ifndef CONFIG_H
#define CONFIG_H
// Pin
#define EN_PIN 7
#define STEP_PIN 4
#define DIR_PIN 3
#define BUTTON_PIN 9
#define LED_PIN 2
#define NUM_STEPS 2048
#define TMC_TX_PIN 5
#endif
motor_control.cpp:
#include <Arduino.h>
#include "motor_control.h"
#include "config.h"
static int stepsToDo = 0;
static int stepsDone = 0;
static unsigned long lastStepTime = 0;
static const unsigned int stepDelayMicros = 1000; // 1ms per passo
static bool motorMoving = false;
void startMoveSteps(int steps) {
stepsToDo = steps;
stepsDone = 0;
lastStepTime = micros();
motorMoving = true;
}
void updateMotor() {
if (!motorMoving) return;
unsigned long now = micros();
if (now - lastStepTime >= stepDelayMicros) {
lastStepTime = now;
// Un impulso
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(5); // breve HIGH per segnale valido
digitalWrite(STEP_PIN, LOW);
stepsDone++;
if (stepsDone >= stepsToDo) {
motorMoving = false;
}
}
}
bool isMotorMoving() {
return motorMoving;
}
motor_control.h:
#ifndef MOTOR_CONTROL_H
#define MOTOR_CONTROL_H
void startMoveSteps(int steps);
void updateMotor();
bool isMotorMoving(); //
#endif
oled_display.cpp:
#include "oled_display.h"
#include "config.h"
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Wire.h>
// Config display
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
#define OLED_ADDRESS 0x3C
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
void setupOLED() {
if (!display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDRESS)) {
Serial.println("ERRORE OLED!");
return;
}
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0, 0);
display.println("OLED OK");
display.display();
}
void updateOLED(uint16_t microsteps) {
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0, 0);
display.print("Microsteps:");
display.setCursor(0, 30);
display.print(microsteps);
display.display();
}
oled_display.h:
#ifndef OLED_DISPLAY_H
#define OLED_DISPLAY_H
#include <Arduino.h>
#include <Adafruit_SSD1306.h>
extern Adafruit_SSD1306 display;
void setupOLED();
void updateOLED(uint16_t microsteps);
#endif
Any help or suggestions would be greatly appreciated. Thanks in advance!

