Hello,
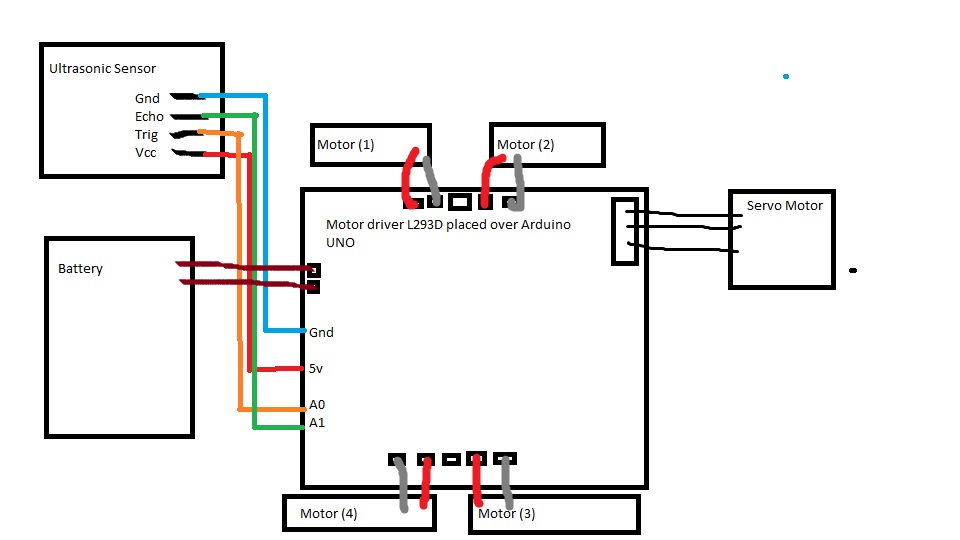
I am trying to make an obstacle avoiding robot using various youtube tutorials. I've connected the Arduino UNO to Motor Driver L293D Shield. The circuit shows :-
When I start it with only battery, just the light on the shield turns on. So i tried powering it with both pc & battery. The servo is working fine, but it is not stopping. Also the motors are not moving at all as well.
You have not read many of the posts on this forum. You have a lousy antique part that loses about 3V between the battery and the motor sometimes more. You are probably following many of the bad suggestions that suggest you use a 9V battery, I believe they may be posted by the battery manufacturers to generate more sales. Now connect the purple wire to the blue one but be sure thye orange does not touch it. Since we cannot see what you can post an annotated schematic showing exactly how you have wired it, showing all connections. Also post links to technical information on your hardware items. The device also needs code so post that following forum guidelines.
Sorry to hear this. Too many Youtubes and Instructables have bad information, so how can you make a robot? I would post a comment to the videos that their information is incorrect... or something like that.
The users here will help you build and program the obstacle avoiding robot. All you need to do is provide the information they ask from you. Add to that list of information:
A schematic is a hand-drawn picture with only horizontal and vertical lines that shows how all components are connected electrically together.
A schematic does NOT show the real ways how the physical wires go from left to right etc.
A schematic shows the principle in a way that makes it easy to analyse what is connected to what by DIS-regarding the physical distribution of the components.
If this is a one up thing fine however if you want to pursue electronics for fun or work you need to do some studying. For Arduino I suggest you get the Arduino Cookbook and read it from cover to cover, it will take a few days but the knowledge gained will be worth it. When your eyes get tired and you have some time watch some tutorials some are good some are krap, use your judgement and over time it will get excellent at determining what is what. If you are really serious get a CAD (Computer Aided Design) program such as KiCad, it is a full schematic capture program that is supported and free. By the time you get through this you will be able to draw professional looking schematics and understand them.
I wouldnt mind reading book for it & Im sure that im interested in it. But right now I am doing it for a science exhibition which is over by a week. So i've to complete it asap. But when I'll be done, I'll start reading arduino cookbook to gain some knowledge about it. Since i'm interested in these things.