hi
i am currently doing my project in pulse measurement using arduino yun
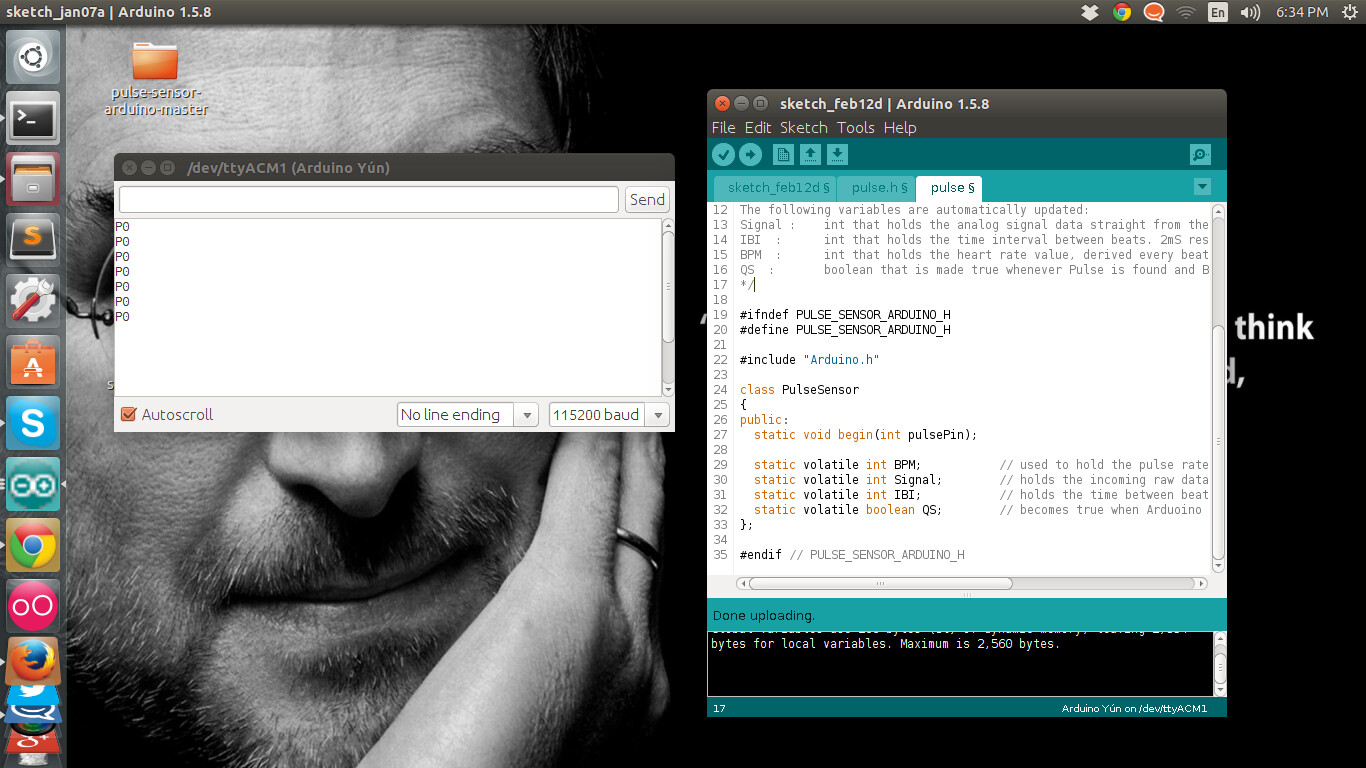
my problem is i am compiling my program it will successfully compile but in the serial monitor my sensor reading is not shown
//my main program
#include <pulse-sensor-arduino.h>
int blinkPin = 13; // pin to blink led at each beat
int fadePin = 5; // pin to do fancy classy fading blink at each beat
int fadeRate = 0; // used to fade LED on with PWM on fadePin
void setup(){
pinMode(blinkPin,OUTPUT); // pin that will blink to your heartbeat!
pinMode(fadePin,OUTPUT); // pin that will fade to your heartbeat!
Serial.begin(115200); // we agree to talk fast!
PulseSensor();
}
void loop(){
sendDataToProcessing('P', PulseSensor::Signal); // send Processing the raw Pulse Sensor data
if (PulseSensor::QS == true){ // Quantified Self flag is true when arduino finds a heartbeat
fadeRate = 255; // Set 'fadeRate' Variable to 255 to fade LED with pulse
sendDataToProcessing('B',PulseSensor::BPM); // send heart rate with a 'B' prefix
sendDataToProcessing('Q',PulseSensor::IBI); // send time between beats with a 'Q' prefix
PulseSensor::QS = false; // reset the Quantified Self flag for next time
}
ledFadeToBeat();
delay(5000); // take a break
}
void ledFadeToBeat(){
fadeRate -= 15; // set LED fade value
fadeRate = constrain(fadeRate,0,255); // keep LED fade value from going into negative numbers!
analogWrite(fadePin,fadeRate); // fade LED
}
void sendDataToProcessing(char symbol, int data ){
Serial.print(symbol); // symbol prefix tells Processing what type of data is coming
Serial.println(data); // the data to send culminating in a carriage return
}
//my cpp program
/*
#include "pulse-sensor-arduino.h"
volatile int rate[10]; // array to hold last ten IBI values
volatile unsigned long sampleCounter = 0; // used to determine pulse timing
volatile unsigned long lastBeatTime = 0; // used to find IBI
volatile int P =512; // used to find peak in pulse wave, seeded
volatile int T = 512; // used to find trough in pulse wave, seeded
volatile int thresh = 512; // used to find instant moment of heart beat, seeded
volatile int amp = 100; // used to hold amplitude of pulse waveform, seeded
volatile boolean firstBeat = true; // used to seed rate array so we startup with reasonable BPM
volatile boolean secondBeat = false; // used to seed rate array so we startup with reasonable BPM
volatile boolean Pulse = false; // true when pulse wave is high, false when it's low
volatile int pulsePin;
volatile int PulseSensor::IBI = 600; // holds the time between beats, must be seeded!
volatile int PulseSensor::BPM; // used to hold the pulse rate
volatile int PulseSensor::Signal; // holds the incoming raw data
volatile boolean PulseSensor::QS = false; // becomes true when Arduino finds a beat
void PulseSensor::begin(int pPin)
{
pinMode(pulsePin, INPUT);
pulsePin = pPin;
// Initializes Timer1 to throw an interrupt every 2ms.
TCCR1A = 0x00;
TCCR1B = 0x0C; // CTC (Compare match mode) and ClockIO/256
OCR1A = 0x7C; // 2 ms
TIMSK1 = 0x02;
sei(); // MAKE SURE GLOBAL INTERRUPTS ARE ENABLED
}
// THIS IS THE TIMER 1 INTERRUPT SERVICE ROUTINE.
// Timer 1 makes sure that we take a reading every 2 miliseconds
ISR(TIMER1_COMPA_vect)
{ // triggered when Timer1 counts to 124
cli(); // disable interrupts while we do this
PulseSensor::Signal = analogRead(pulsePin); // read the Pulse Sensor
sampleCounter += 2; // keep track of the time in ms with this variable
int N = sampleCounter - lastBeatTime; // monitor the time since the last beat to avoid noise
// find the peak and trough of the pulse wave
if(PulseSensor::Signal < thresh && N > (PulseSensor::IBI/5)*3){ // avoid dichrotic noise by waiting 3/5 of last IBI
if (PulseSensor::Signal < T){ // T is the trough
T = PulseSensor::Signal; // keep track of lowest point in pulse wave
}
}
if(PulseSensor::Signal > thresh && PulseSensor::Signal > P){ // thresh condition helps avoid noise
P = PulseSensor::Signal; // P is the peak
} // keep track of highest point in pulse wave
// NOW IT'S TIME TO LOOK FOR THE HEART BEAT
// signal surges up in value every time there is a pulse
if (N > 250){ // avoid high frequency noise
if ( (PulseSensor::Signal > thresh) && (Pulse == false) && (N > (PulseSensor::IBI/5)*3) )
{
Pulse = true; // set the Pulse flag when we think there is a pulse
PulseSensor::IBI = sampleCounter - lastBeatTime; // measure time between beats in mS
lastBeatTime = sampleCounter; // keep track of time for next pulse
if(secondBeat){ // if this is the second beat, if secondBeat == TRUE
secondBeat = false; // clear secondBeat flag
for(int i=0; i<=9; i++){ // seed the running total to get a realisitic BPM at startup
rate[i] = PulseSensor::IBI;
}
}
if(firstBeat){ // if it's the first time we found a beat, if firstBeat == TRUE
firstBeat = false; // clear firstBeat flag
secondBeat = true; // set the second beat flag
sei(); // enable interrupts again
return; // IBI value is unreliable so discard it
}
// keep a running total of the last 10 IBI values
word runningTotal = 0; // clear the runningTotal variable
for(int i=0; i<=8; i++){ // shift data in the rate array
rate[i] = rate[i+1]; // and drop the oldest IBI value
runningTotal += rate[i]; // add up the 9 oldest IBI values
}
rate[9] = PulseSensor::IBI; // add the latest IBI to the rate array
runningTotal += rate[9]; // add the latest IBI to runningTotal
runningTotal /= 10; // average the last 10 IBI values
PulseSensor::BPM = 60000/runningTotal; // how many beats can fit into a minute? that's BPM!
PulseSensor::QS = true; // set Quantified Self flag
// QS FLAG IS NOT CLEARED INSIDE THIS ISR
}
}
if (PulseSensor::Signal < thresh && Pulse == true){ // when the values are going down, the beat is over
Pulse = false; // reset the Pulse flag so we can do it again
amp = P - T; // get amplitude of the pulse wave
thresh = amp/2 + T; // set thresh at 50% of the amplitude
P = thresh; // reset these for next time
T = thresh;
}
if (N > 2500){ // if 2.5 seconds go by without a beat
thresh = 512; // set thresh default
P = 512; // set P default
T = 512; // set T default
lastBeatTime = sampleCounter; // bring the lastBeatTime up to date
firstBeat = true; // set these to avoid noise
secondBeat = false; // when we get the heartbeat back
}
sei(); // enable interrupts when youre done!
} // end isr
//my header file
#ifndef PULSE_SENSOR_ARDUINO_H
#define PULSE_SENSOR_ARDUINO_H
#include "Arduino.h"
class PulseSensor
{
public:
static void begin(int pulsePin);
static volatile int BPM; // used to hold the pulse rate
static volatile int Signal; // holds the incoming raw data
static volatile int IBI; // holds the time between beats, must be seeded!
static volatile boolean QS; // becomes true when Arduoino finds a beat.
};
#endif // PULSE_SENSOR_ARDUINO_H
serial monitor image