I need to make a project, a device that can jump up and twist over itself 360 degrees, i.e. do somersaults. I'm new to arduino, and I don't know what can be used to realize a jump, twist in the air (at the right number of degrees) and soft landing, shock absorption. I will be glad to any help.
Welcome to the forum
This project is far too ambitious for someone new to Arduino. Do you have any previous programming , electronics and mechanical engineering experience ?
Yeah, I have a little experience. But if everything is so complicated, I wonder at least how to realize jump and landing, without scrolling in flight.
To jump you need to release an amount of energy downwards to cause the robot to move upwards
To make the robot spin in the air you can either direct the force in a direction off axis rather than directly downwards or cause the robot to spin once it has jumped, which is more difficult
You need to measure the rotation to enable the robot to land upright when its legs are in the right place at the right time
Ideally the robot legs would bend on landing to help absorb the impact and you will need to stabilise the robot by moving its limbs to compensate for forward/reverse movement once it has landed
Can you see why I said
@whales_nik - I agree this project is far too advanced for your level of knowledge. Soon, you will be able to do this, so put this in your Nik's Engineering Notebook (you do have a quad-rule, notebook for your ideas, get one! you will have too many ideas to remember).
Have you ever been scolded for allowing your father's tape measure to snap closed?

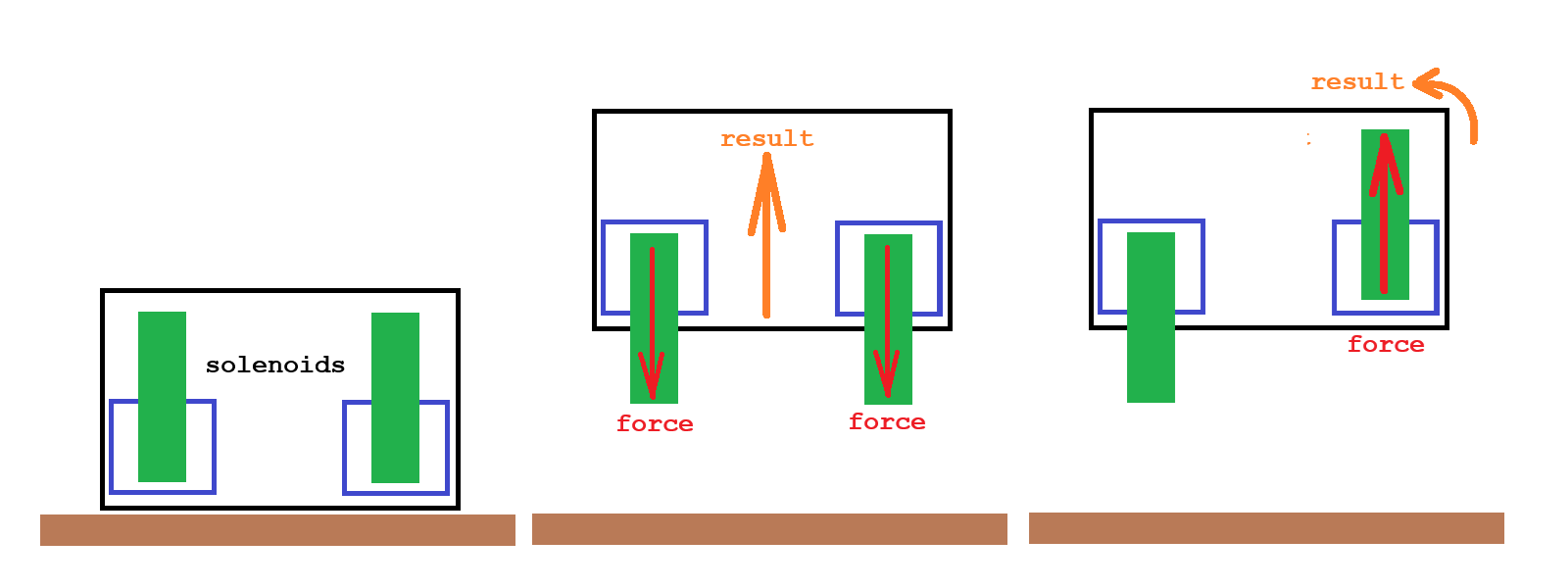
- Four plunger/solenoids,
- triggered simultaneously,
- trigger two solenoids at the midpoint of
d = 1/2*g*t^2
1 Like
Reaction wheels are a great way to do fun tricks, including somersaults:

1 Like
This topic was automatically closed 180 days after the last reply. New replies are no longer allowed.