Hey guys. Well it's been a while - nearly 2 months! But there is a new version available now! I did some groundwork and tried to tidy up a lot of code but in the end I'm just half done ... that's why I thought I might release the updates I already have and keep the rest for later ![]() And well there are quite a few new features!
And well there are quite a few new features!
What's new in "Version 2.11" aka Change log:
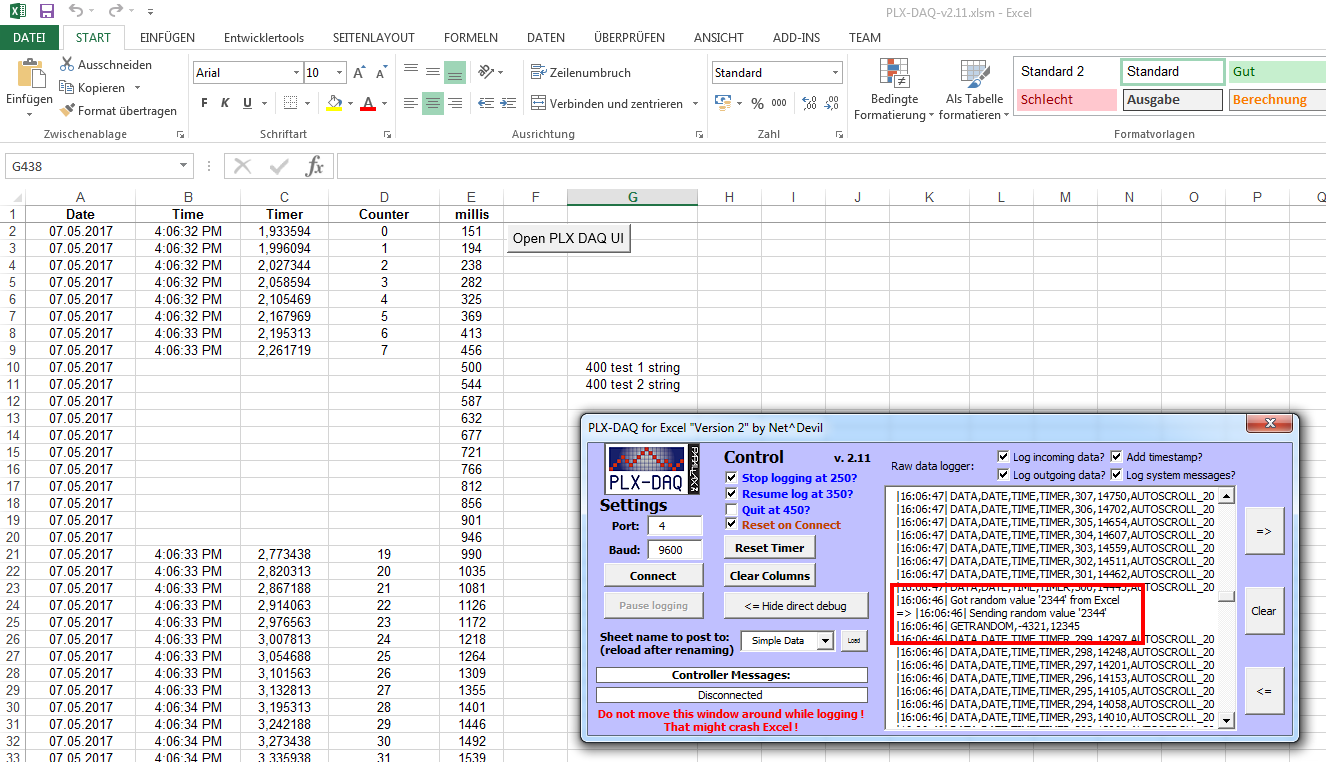
- Extended DATA command by the parameter AUTOSCROLL_XY. Autoscroll will automatically scroll your Excel sheet along with each new row of data which is read and posted. XY can be replaced by any number (e.g., 20) to control how many additional lines should be shown above as well during scrolling.
Please note: AUTOSCROLL feature is available only in Office 2013 and newer. In older versions the command will be ignored by PLX DAQ. - Added a new function: GetRandom(min,max). It basically just returns a random number between min and max. Very useful if you need a random number for Arduino's randomSeed() to be initialized
- Added several features to the direct debug window. The size can now be increased or decreased (to a certain extend), content can be cleared and you can decide what you want to log: incoming data, outgoing data, system data. Also a time stamp can be added if wanted.
- Added a default line break after all data send to the Arduino. Thus no more delays are necessary before or after get/set calls. In order to read incoming data one should use either Serial.readStringUntil(10); or Serial.readStringUntil(10).toInt(); or Serial.readStringUntil(10).toFloat(); from now on
- Optimized the way Excel processes multiple incoming lines of data for better performance
- There are some new parameters which can be changed on the (hidden) settings sheet in Excel. Those "Expert Configs" should be handled with care. They are about the buffer sizes for your COM port. In case you decide to spam massive amount of data to Excel and increase the baud rate you might experience data loss. Try increasing the buffer sizes then.
- Added a "PowerDemos" directory with some nice (at least I think so) demos. First demo is a moving self updating graph visualizing data from the Arduino.
- Updated the Beginners Guide to reflect all new commands - and optimized the formatting as well
- Updated the default sketch to include the new commands
Backlog for next version(s):
- find a solution for Excel crashing when moving the window around while logging. Priority: low ; Workaround: don't move window while logging ; Status: clueless...
- Double check if issue above existed in PLX DAQ v1 as well. In case yes => we are screwed
- Rework API calls and general COM port communication handling for better stability. Very promising example to be found here. Works with up to 2.000.000 baud
Guideline to migrate from old version to new one ==> see Beginners Guide attached
Image-Link: http://www.freebie-base.de/Pics/PLX_DAQ_v2.11.png
(hosted on my server, no traffic hijack)

PLX-DAQ-v2.11.zip (502 KB)

{kind=link}
PLX-DAQ-v2-PowerDemos-v01.zip (193 KB)
Beginners Guide to PLX DAQ v2 (rev1).doc (188 KB)
__Old-Versions-changelog.doc (44.5 KB)
PLX-DAQ-v2-DefaultSketch.ino (3.94 KB)