I'm somewhat new to servos, the only servo I've ever dealt with was the AX-12, which was used to build a robot called Bioloid. What I noticed about those servos was that they could be connected to one another, so that first servo would move in one axis, moving the second servo as well, and the other would move in another axis. For example, in a robot's foot, one servo could be the ankle, lifting the feet up or down, and the other could be the feet itself, moving left or right.
I'm looking to do a small project where I connect two servos that could do something like that, I need one servo to move another and the other servo to move an attachment like in the image
Here is a video showing an example of servos moving each other:
I've been looking on Amazon on servos but every item I see is reviewed poorly. Also, and this is more important, I'm not sure which servo I can buy that can meet my demand of being able to move another servo, and this is where I need your help.
Can you assist in finding me whatever I need (be it another servo, a special attachment, etc.)? Thank you!
I am not sure what you mean about one servo moving another servo.
If you need multiple servos to move, give them commands to move. Why does your project require this strange arrangement.
Actually, why don’t you tell us what you are really trying to do? What are you making?
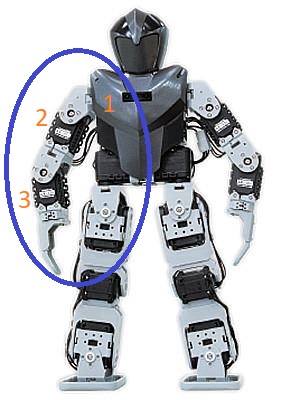
About what I mean - consider this robot (in my attachment), for example. See how it has 3 servos (one is hidden)? Servo number 1 (hidden) is the shoulder. servo number 2 is the elbow. servo number 3 is the hand. When you move servo 1, it moves servos 2 and 3. when you move servo number 2, it moves servo number 3. That's what I mean.
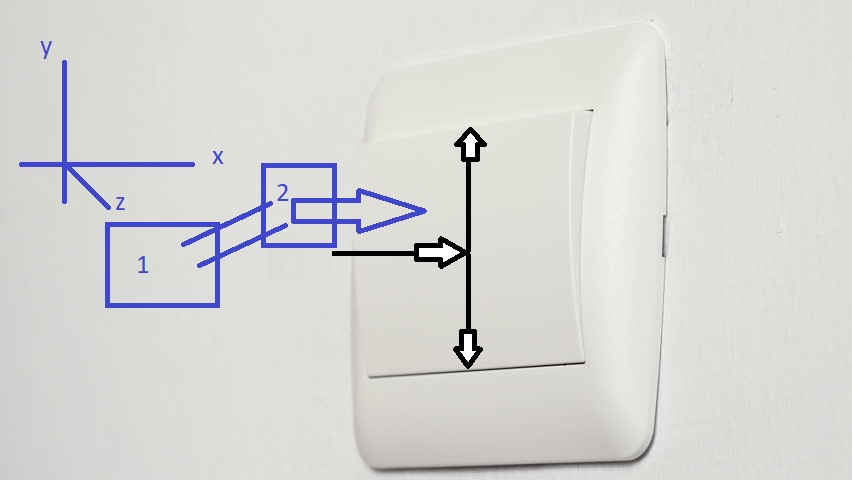
About what I want to do - see second attachment. I want two servos that can turn a light switch on and off (yes, it's silly, I know :))). To turn it on, servo number 1 must move servo number 2 in the Y axis upwards. Then, servo number two needs to move some attachment in the Z axis to press the switch.
No, I'm still not seeing it. The advantage of driving things with a program in a little computer is that you design the program to move servo1 and then move servo2 etc. That's why we use programmable devices like Arduinos.
So what is the point of getting servo1 to do all the computing needed to decide when and where to move servo2? You've already got a computer that can easily manage them all.
Or if you aren't planning on using an Arduino you're in the wrong place!
No it doesn't. Each of those servos is being moved independently by the Arduino. If you look carefully you'll see all the signal wires are connected to different pins on the Arduino.
You mean like flexing your elbow causes your hand to occupy a different place? (I'm trying not to use the word 'move'.)
Building the mechanical parts for a robot arm is more difficult than you expect. Servos were originally invented for the controls on model planes. Those controls are very light. The servo cannot lift the weight of the model.
So you need to find servos with enough torque that they can lift the weight of the arm and the servos on the arm. It should be obvious that the "finger" servos are smaller than the "shoulder" servos.