Hello, so I have a project about making a rover that goes to a certain x,y coordinate (goal) whilst also having the ability to avoid any obstacle hindering its path toward the said goal. I found an old YT video here, which is exactly what I intend to do. The only problem I have is that it's outdated as hell; it was made about nine years ago.
The owner of the project did not provide any wiring diagram for the hardware, but I got lucky because he managed to share his source code in the comments section. Here it is:
#include <math.h>
int optokiri = 1;
int optokanan = 0;
int Motorkiri_A = 10;
int Motorkiri_B = 9;
int Motorkanan_B = 6;
int Motorkanan_A = 5;
int a = 0;
float duration;
float distance;
int jarak = 50;
int servo = 8;
const int ping = 7;
unsigned long count = 0;
unsigned long countkanan = 0;
float pi = 3.14;
float R = 3.25;
int N = 12;
int L = 12;
//Servo
int Period = 5000;
int first = 700;
int finish = 2500;
int increment = 10;
int current = 0;
int finish_old;
int first_old;
//PID
int maxspd = 255;
int Vo= 80;
float V_kiri;
float V_kanan;
float error = 0;
float error2 = 0;
float error_P = 0;
float error_I = 0;
float error_D = 0;
float P = 0;
float I = 0;
float D = 0;
float w = 0;
float Kp = 6 ;
float Ki = 1/1000 ;
float Kd = 7 ;
//Go to goal
float count_new = 0;
float countkanan_new = 0;
float count_old = 0;
float countkanan_old = 0;
float D_countkanan = 0;
float D_count = 0;
float DR = 0;
float DL = 0;
float DC = 0;
float X_new = 0;
float Y_new = 0;
float tetha_new = 0;
float X_old = 0;
float Y_old = 0;
float tetha_old = 0;
float goalX = 0;
float goalY = 0;
float dX = 0;
float dY = 0;
float goal_tetha = 0;
float error_tetha = 0;
float dt = 1/10;
float range = 8;
int q = 1;
int cm = 0;
int pwm;
int angle;
//Matrix
int k,l;
float d1 = 0;
float d2 = 0;
float d3 = 0;
float d4 = 0;
float d5 = 0;
float t1 = 0;
float t2 = 0;
float t3 = 0;
float t4 = 0;
float t5 = 0;
float M1_1, M1_2, M1_3;
float M2_1, M2_2, M2_3;
float M3_1, M3_2, M3_3;
float M4_1, M4_2, M4_3;
float M5_1, M5_2, M5_3;
float Mx1_1, Mx1_2, Mx1_3;
float Mx2_1, Mx2_2, Mx2_3;
float Mx3_1, Mx3_2, Mx3_3;
float Mx4_1, Mx4_2, Mx4_3;
float Mx5_1, Mx5_2, Mx5_3;
float J_X, J_Y, J_T;
void setup() {
Serial.begin(9600);
attachInterrupt(optokiri, encoderL, FALLING);
attachInterrupt(optokanan, encoderR, FALLING);
pinMode(Motorkiri_A, OUTPUT);
pinMode(Motorkiri_B, OUTPUT);
pinMode(Motorkanan_A, OUTPUT);
pinMode(Motorkanan_B, OUTPUT);
pinMode(servo, OUTPUT);
}
void loop() {
geserkiri();
geserkanan();
cekobs();
}
void cekobs() {
if ((d1 < jarak) || (d2 < jarak) || (d3 < jarak) || (d4 < jarak) || (d5 < jarak)){
hindari();
}
else {
execute_go_to_goal();
}
}
void hindari() {
Kp = 6;
Kd = 7;
goalX = J_X/5; goalY = J_Y/5;
for(k=0; k<300; k++) {
countkanan_new = countkanan;
count_new = count;
go_to_goal();
if (d1 < d2) { V_kanan = V_kanan*1.2; }
else if (d1 > d2) {V_kanan = V_kanan*1.3; }
if (d5 < d4) { V_kiri = V_kiri*1.2; }
else if (d5 > d4) {V_kiri = V_kiri*1.3; }
if (d2 < 15 && d3 < 15 && d1 < 15) {V_kanan = 70; V_kiri = 5; }
if (d4 < 15 && d3 < 15 && d5 < 15) {V_kiri = 70; V_kanan = 5;}
absolute_V();
execute_motor();
delay (dt*1000);
}
stopped();
delay (500);
}
void execute_go_to_goal() {
goalX = 180; goalY = 50;
for (l=0; l<600; l++) {
countkanan_new = countkanan;
count_new = count;
go_to_goal();
absolute_V();
execute_motor();
delay (dt*1000);
while ((X_new < (goalX + range)) && (X_new > (goalX - range)) && (Y_new < (goalY + range)) && (Y_new > (goalY - range))) {
stopped();
for (a=0; a<=100; a++){
delay (1000);
a=0;
}
}
}
stopped();
delay(500);
}
void go_to_goal () {
estimate_position();
dX = goalX - X_new;
dY = goalY - Y_new;
goal_tetha = atan2 (dY,dX);
error_tetha = goal_tetha - tetha_new;
error_tetha = atan2 (sin(error_tetha),cos(error_tetha));
error_P = error_tetha ;
P = Kp * error_P ;
error_I = error_tetha + error_I;
I = Ki * error_I ;
error_D = error_tetha - error2;
D = Kd * error_D ;
error2 = error_tetha ;
w = P + I + D ;
V_kanan = ((2*Vo + w*L)/(2*R));
V_kiri = ((2*Vo - w*L)/(2*R));
}
void estimate_position () {
D_countkanan = countkanan_new - countkanan_old;
D_count = count_new - count_old;
DR = 2* pi * R * D_countkanan / N ;
DL = 2* pi * R * D_count / N ;
DC = (DR + DL)/2 ;
X_new = X_old + DC * cos (tetha_old);
Y_new = Y_old + DC * sin (tetha_old);
tetha_new = tetha_old + ((DR - DL) / L);
tetha_new = atan2(sin(tetha_new),cos(tetha_new));
countkanan_old = countkanan_new;
count_old = count_new;
X_old = X_new;
Y_old = Y_new;
tetha_old = tetha_new;
}
void absolute_V () {
if (V_kiri>maxspd) {
V_kiri=maxspd;
}
else if (V_kiri<-maxspd) {
V_kiri=-maxspd;
}
if (V_kanan>maxspd) {
V_kanan=maxspd;
}
else if (V_kanan<-maxspd) {
V_kanan=-maxspd;
}
}
void execute_motor () {
if ((V_kiri > 0)&&(V_kanan >0)) {
forward();
}
else if((V_kiri < 0)&&(V_kanan < 0)) {
V_kiri=0-V_kiri;
V_kanan=0-V_kanan;
backward();
}
else if((V_kiri > 0)&&(V_kanan < 0)) {
V_kanan=0-V_kanan;
turn_right();
}
else if((V_kiri < 0)&&(V_kanan > 0)) {
V_kiri=0-V_kiri;
turn_left();
}
}
void stopped() {
analogWrite (Motorkiri_A , 0 );
analogWrite (Motorkiri_B, 0 );
analogWrite (Motorkanan_A , 0 );
analogWrite (Motorkanan_B , 0 );
}
void forward() {
V_kiri = map(V_kiri , 0,100,0,255);
V_kanan = map(V_kanan, 0,100,0,255);
analogWrite (Motorkiri_A , V_kiri );
digitalWrite (Motorkiri_B, LOW );
analogWrite (Motorkanan_A , V_kanan);
digitalWrite (Motorkanan_B , LOW );
}
void backward() {
V_kiri = map(V_kiri , 0,100,0,255);
V_kanan = map(V_kanan, 0,100,0,255);
digitalWrite (Motorkiri_A , LOW );
analogWrite (Motorkiri_B, V_kiri );
digitalWrite (Motorkanan_A , LOW );
analogWrite (Motorkanan_B , V_kanan);
}
void turn_right() {
V_kiri = map(V_kiri , 0,100,0,255);
V_kanan = map(V_kanan, 0,100,0,255);
analogWrite (Motorkiri_A , V_kiri );
digitalWrite (Motorkiri_B, LOW );
digitalWrite (Motorkanan_A , LOW );
analogWrite (Motorkanan_B , V_kanan);
}
void turn_left() {
V_kiri = map(V_kiri , 0,100,0,255);
V_kanan = map(V_kanan, 0,100,0,255);
digitalWrite (Motorkiri_A , LOW );
analogWrite (Motorkiri_B, V_kiri );
analogWrite (Motorkanan_A , V_kanan);
digitalWrite (Motorkanan_B , LOW );
}
void ultra()
{
long duration, inches;
pinMode(ping, OUTPUT);
digitalWrite(ping, LOW);
delayMicroseconds(2);
digitalWrite(ping, HIGH);
delayMicroseconds(5);
digitalWrite(ping, LOW);
pinMode(ping, INPUT);
duration = pulseIn(ping, HIGH);
cm = microsecondsToCentimeters(duration);
distance = cm;
Serial.println(cm);
if (distance > 100) {
distance = 100;
}
delay(50);
}
void servo_to_right(){
for(current = first_old; current >first; current-=increment){
digitalWrite(servo, HIGH);
delayMicroseconds(current);
digitalWrite(servo, LOW);
delayMicroseconds(2000);
}
}
void servo_to_left(){
for(current = finish_old; current <finish; current+=increment){
digitalWrite(servo, HIGH);
delayMicroseconds(current);
digitalWrite(servo, LOW);
delayMicroseconds(25000-current);
}
finish_old=finish;
}
void geserkiri(){
ultra();
d1= distance;
t1= -1.57079;
m1();
finish_old=first;
finish = 1250 ;
servo_to_left();
delay (200);
ultra();
d2= distance;
t2= -0.78539;
m2();
finish = 1600;
servo_to_left();
delay (200);
ultra();
d3= distance;
t3= 0;
m3();
finish = 2050;
servo_to_left();
delay (200);
ultra();
d4= distance;
t4= 0.78539;
m4();
finish = 2500;
servo_to_left();
delay (200);
ultra();
d5= distance;
t5= 1.57079;
m5();
jumlahmatrix();
}
void geserkanan(){
first_old = finish;
first = 700;
servo_to_right();
delay (200);
}
void m1() {
M1_1 = cos(t1)*d1 - sin(t1)*0 + 0*1;
M1_2 = sin(t1)*d1 + cos(t1)*0 + 0*0;
M1_3 = 0*d1 + 0*0 + 1*1;
Mx1_1 = cos(tetha_new)*M1_1 - sin(tetha_new)*M1_2 + X_new*M1_3;
Mx1_2 = sin(tetha_new)*M1_1 + cos(tetha_new)*M1_2 + Y_new*M1_3;
Mx1_3 = 0*M1_1 + 0*M1_2 + 1*M1_3;
}
void m2() {
M2_1 = cos(t2)*d2 - sin(t2)*0 + 0*1;
M2_2 = sin(t2)*d2 + cos(t2)*0 + 0*0;
M2_3 = 0*d2 + 0*0 + 1*1;
Mx2_1 = cos(tetha_new)*M2_1 - sin(tetha_new)*M2_2 + X_new*M2_3;
Mx2_2 = sin(tetha_new)*M2_1 + cos(tetha_new)*M2_2 + Y_new*M2_3;
Mx2_3 = 0*M2_1 + 0*M2_2 + 1*M2_3;
}
void m3() {
M3_1 = cos(t3)*d3 - sin(t3)*0 + 0*1;
M3_2 = sin(t3)*d3 + cos(t3)*0 + 0*0;
M3_3 = 0*d3 + 0*0 + 1*1;
Mx3_1 = cos(tetha_new)*M3_1 - sin(tetha_new)*M3_2 + X_new*M3_3;
Mx3_2 = sin(tetha_new)*M3_1 + cos(tetha_new)*M3_2 + Y_new*M3_3;
Mx3_3 = 0*M3_1 + 0*M3_2 + 1*M3_3;
}
void m4() {
M4_1 = cos(t4)*d4 - sin(t4)*0 + 0*1;
M4_2 = sin(t4)*d4 + cos(t4)*0 + 0*0;
M4_3 = 0*d4 + 0*0 + 1*1;
Mx4_1 = cos(tetha_new)*M4_1 - sin(tetha_new)*M4_2 + X_new*M4_3;
Mx4_2 = sin(tetha_new)*M4_1 + cos(tetha_new)*M4_2 + Y_new*M4_3;
Mx4_3 = 0*M4_1 + 0*M4_2 + 1*M4_3;
}
void m5() {
M5_1 = cos(t5)*d5 - sin(t5)*0 + 0*1;
M5_2 = sin(t5)*d5 + cos(t5)*0 + 0*0;
M5_3 = 0*d5 + 0*0 + 1*1;
Mx5_1 = cos(tetha_new)*M5_1 - sin(tetha_new)*M5_2 + X_new*M5_3;
Mx5_2 = sin(tetha_new)*M5_1 + cos(tetha_new)*M5_2 + Y_new*M5_3;
Mx5_3 = 0*M5_1 + 0*M5_2 + 1*M5_3;
}
void jumlahmatrix() {
J_X = Mx1_1 + Mx2_1 + Mx3_1 + Mx4_1 + Mx5_1;
J_Y = Mx1_2 + Mx2_2 + Mx3_2 + Mx4_2 + Mx5_2;
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 26 / 2;
}
void encoderL() {
count++;
}
void encoderR() {
countkanan++;
}
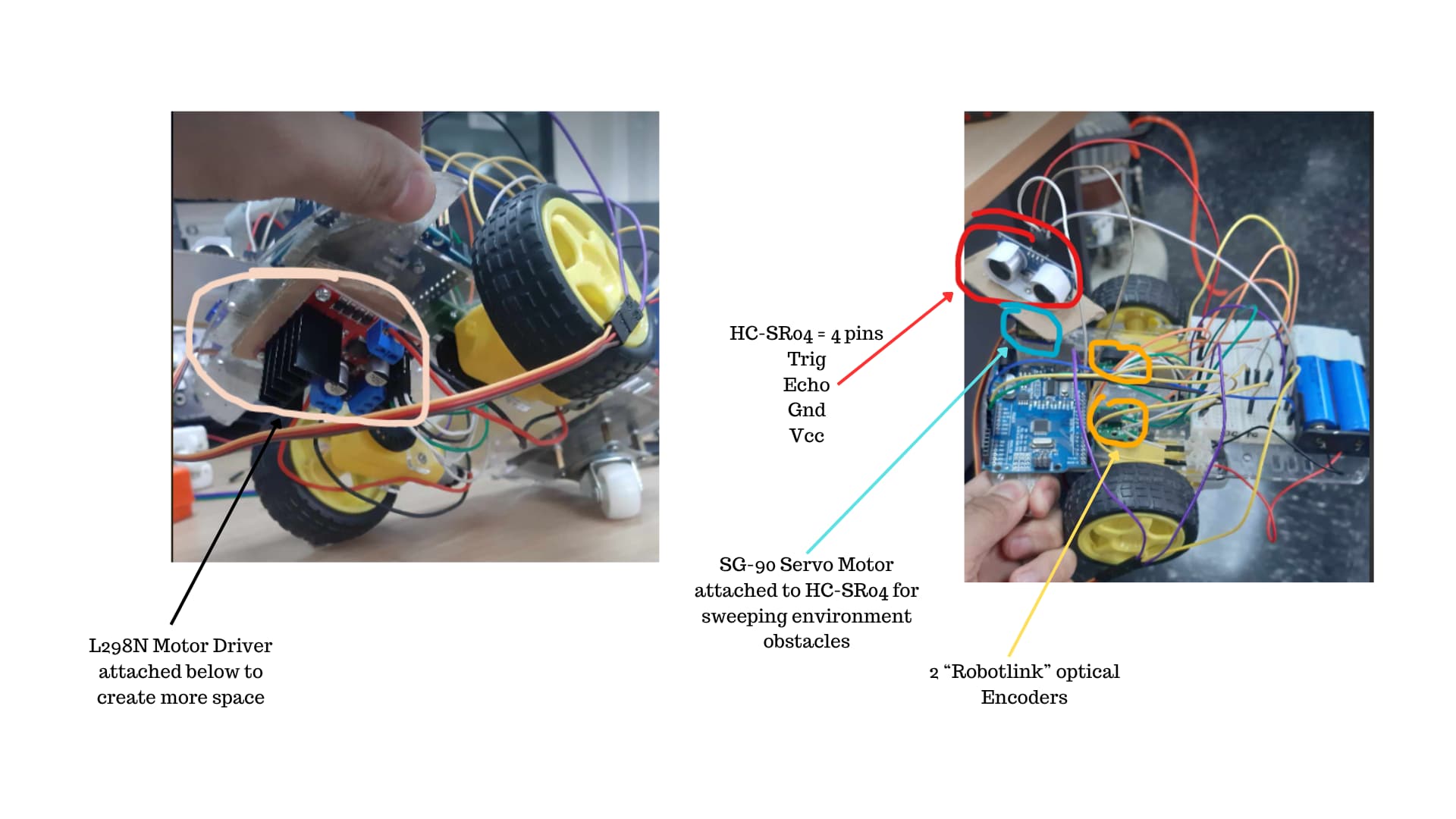
From what I've gotten in the video, he used the following materials
- L298N motor driver, a
- PING ultrasonic sensor (since he only had 1 pin dedicated for in the code),
- 2 DC motors (of course),
- A servo motor and
- 2 pcs. of speed encoders
I attached an image of my hardware and a Fritzing Wiring diagram to understand my connections better. Also, I used a 7.4V, 2200mAh 18650 battery to supply the motors.

The thing I changed in the source code is within the "ultra()" function. Since I added it, I have more pins assigning the trig and echo, respectively. Also, I changed the Opto Pins from 1&0 to 2&3 instead because I thought hardware interrupts in Arduino UNO were only possible in pins 2&3. Here are some notable changes:
int servo = 11; // Connect Servo Output
int trigPin = 7; // Connect Trig to pin 7
int echoPin = 8; // Connect Echo to pin 8
void setup() {
pinMode(servo, OUTPUT);
pinMode(echoPin, INPUT); // Change ping to echoPin
pinMode(trigPin, OUTPUT); // Change ping to trigPin
}
void ultra() {
long duration, inches;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(5);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Change ping to echoPin
cm = microsecondsToCentimeters(duration);
distance = cm;
Serial.println(cm);
if (distance > 100) {
distance = 100;
}
delay(50);
}
The first simulation results only showed that the servo motor was working. My rover did not move and remained stationary, so I definitely fucked up somewhere. Can you guys help??