Hello Everybody!
I hope You are fine and doing well. ![]()
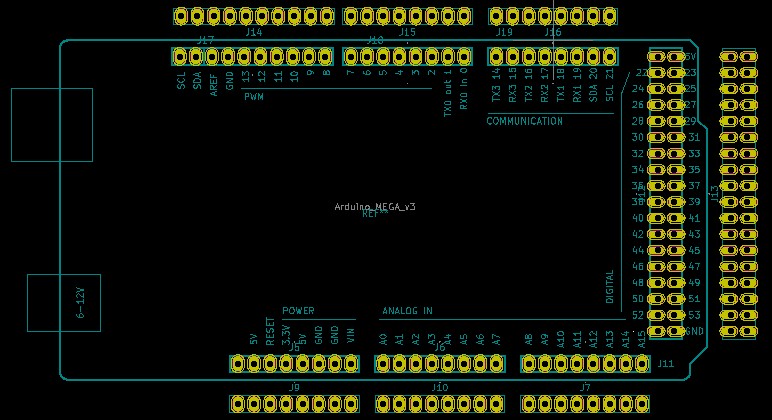
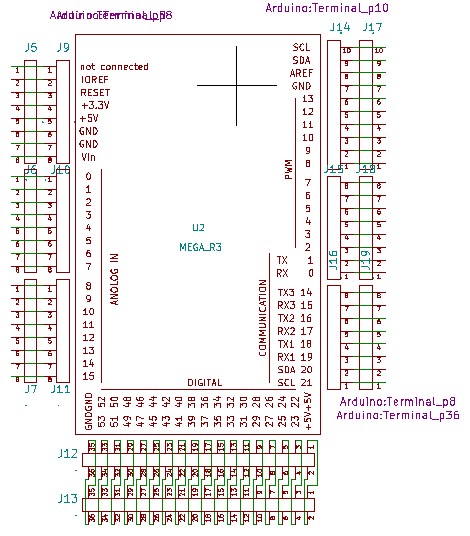
Just for my curiosity, I started to work on a robot rover shield for Arduino MEGA. (Outdoor application.)
My main goal is to come up with some generic, but versatile and affordable shield,
which can be interesting for other as well.
First I would like to define which type of input/output devices are required.
So the connectors (JST?) can be placed accordingly on the PCB.
I considered with the following features:
INPUT:
- 2 encoders (magnetic type) from the 2 DC motors,
- 1 ambient & 1 battery temperature (DS18B20) measurement,
- 1 battery volt, 1 battery current (ACS712 30A) measurement,
- 1 rain drop sensor,
- 1 IMU (9 DOF Bosch BNO055 on I2C ) for orientation/heading,
- 3 ultrasonic distance sensor (HC-SR04 on the left, right & center) for obstetrical avoidance,
- 3 momentary buttons for diagnostic,
- 1 switch for manual to auto mode,
- 1 PS2 controller for manual mode.
OUTPUT:
- 2 DC motor control 2x (pwm + dir1/dir2) for external motor driver,
(Option can be, input from the motor drivers: current sensor, over temperature and short circuit detection), - 1 4x20 LCD display (I2C type),
- 3 relays to operate some device on the rover,
- 3 servo motor connections,
INPUT & OUTPUT:
- XBee, GSM, GPS module connections on serial port 1-3,
- Jetson Nano on serial 0 (for visual servoing with simple webcam)
I'm not planning:
- LiDAR
What else can be added or modified?
Thank You very much for Your valuable suggestions in advance.