@ Realizer
Nein ist kein Widerspruch.
@ WalterM
Ist nichts kaputt. Du hast eine zu kleine Versorgungspannung. Die muß sehr viel größer, als die nominelle sein und mit dem Schrittmotortreiber begrenzt Du den Strom des Schrittmotors.
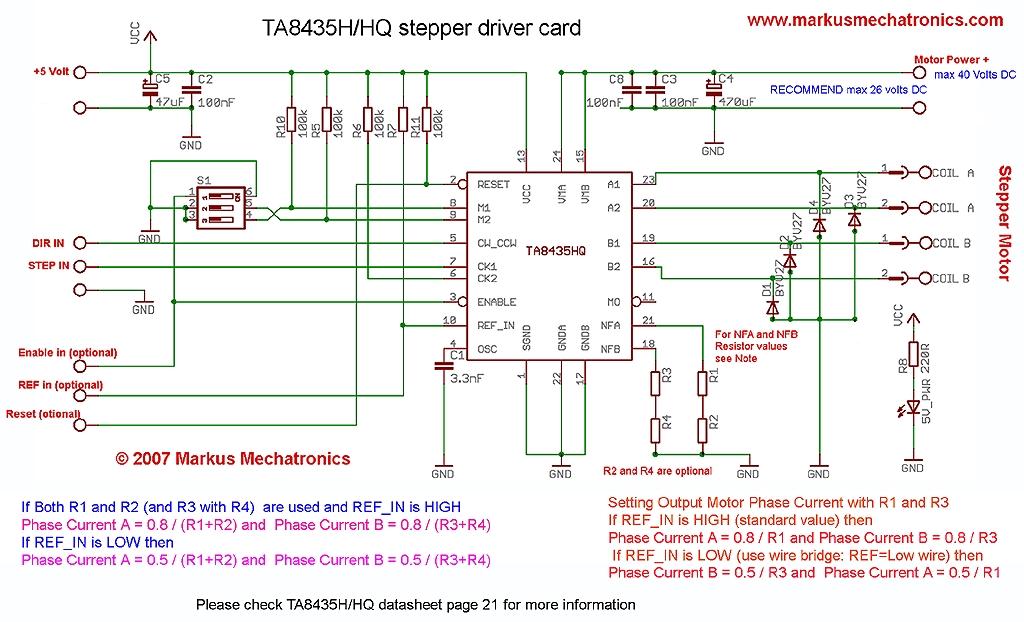
Die Treiber-Platine die Du benutzt hat einen TA8435HQ. cnchungary.com
Auf Seite 10 findest Du die Strommodulation für 8tel Microschritt.
Die Mikroschritte funktionieren folgendermaßen.
Wenn man beide Spulen des Motors mit je 71% Nennstrom ansteuert dann positioniert sich der Rotor zwischen den beiden Polzähnen, also 45 grad. (360 Grad sind eine volle Schrittfolge und entsperchen 4 Schritten)
Wenn man bei einer Spule jetzt mit 40% und 91% Nennstrom ansteuert dann positioniert sich der Rotor zwischen 0 Grad und 45 Grad genaugesagt 22,5 Grad.
Bei mehr Mikroschriten ist die Unterteilung feiner.
Damit dei Mikroschritte funktionieren muß der Strom Durch den Treiberbaustein begrenzt werden. Dieser macht es indem der Strom durch die Spulen des Motorsgemessen wird (R1 bis R4 auf http://www.markusmechatronics.com/Schematic_TA8435HQ_SCREEN.jpg , Rnf auf dem Datenblatt)
Über eine Komparator vergleicht der Baustein die Spannung über die Strommeßwiderstände mit einer Referenzspannung und schaltet bei Erreichen dieser die Treiberstufe aus, sodaß im Endefekt der Strom begrenzt wird. Die Referenzspannung wird über einer Referenzspannung zusammen mit einem Zähler und einem nicht linearen DAC erzeugt. Siehe Blockschaltbild Seite 2 des obengenannten Datenblatts des TA8435.
Die Strombegrenzung erfolgt durch Abschalten der Treiberstufe und Wiedereinschalten nach einer gewissen Latenzzeit. Dies ist besser auf Seite 9 eines ähnichen Treibers erklährt. http://www.allegromicro.com/en/Products/Part_Numbers/4983/4983.pdf
Nun zu Deinem Problem.
Der Strom durch die Windungen des Schrittmotors wird ohne Regelung durch 3 Parameter bestimmt: der Versorgungsspannung, dem Windungswiderstand und der Windungsinduktivität.
Die Induktivität hat umso mehr Einfluß je schneller die Ansteuerungfrequenz ist.
Die Induktivität versucht den Strom langsam ansteigen zu lassen. Nach diesem "langsamen" Ansteigen des Stroms bedingt durch die Induktivität gilt das Ohmsche Gesetz I= U/Rmotor.
Beim Motortreiber mußt Du Vref so einstellen daß Nennstrom am Motor fließen. (Vollschritte einstellen und eine Spule versorgen und nachmessen ( Ampermeter oder an R1 bis R2)
Wenn jetzt Die Versorgungspannung zu gering ist wird der Strom durch den Spulenwiderstand begrenzt und der Sinusförmige Strom abgeschnitten. Darum siehst Du, daß die Zwischenschritte nicht alle gemacht werden weil zb der Strom bei 50% begrenzt wird und nicht größer werden kann um die weiteren Schritte bis 100% zu machen ( das sind in meinem Beispiel 9 von 16 Schritten) Da aber zB 0% und 50% (der beiden Motorwindungen) wieder ein (etwas leistungsschwacher) Vollschritt ist verlierst Du keine Schritte.
Hoffe etwas verständlich gewesen zu sein. Das war jetzt ein Roman....
@jan4321
Der Motor, den Du nennst, ist bei Pollin leider ausverkauft, aber Du hast ihn ja schon.
http://www.eminebea.com/content/html/en/motor_list/pm_motor/pdf/pm42l048.pdf
Grüße Uwe
{kind=link}