tl;dr VMOT is 3.8V on the DRV8825, and I've read that it needs 8.2V (minimum 7.8V), but my power supply is delivering 12V at the input terminals. Not sure if this is board or driver issue or if I need a 24V power supply. I also measured continuity between CNC shield and driver DIR pin, which I understand should not be the case (measure's 12V when powered, but should be 5V for logic). Faulty CNC shield or insufficient power supply?
Problem: stepper motors don’t move, more specifically they don’t seem to be energized because they have no holding torque.
Project: building a CNC plotter as described here: https://howtomechatronics.com/projects/diy-pen-plotter-with-automatic-tool-changer-cnc-drawing-machine/
Parts:
Arduino UNO
V3 CNC shield
NEMA stepper motors (1.5A)
DRV8825 drivers tuned to 0.6V, as in 0.8 * 1.5 / 2 (80% of 1.5A/2 for motors)
12V 15A power supply (inline 10A fuse between supply and board)
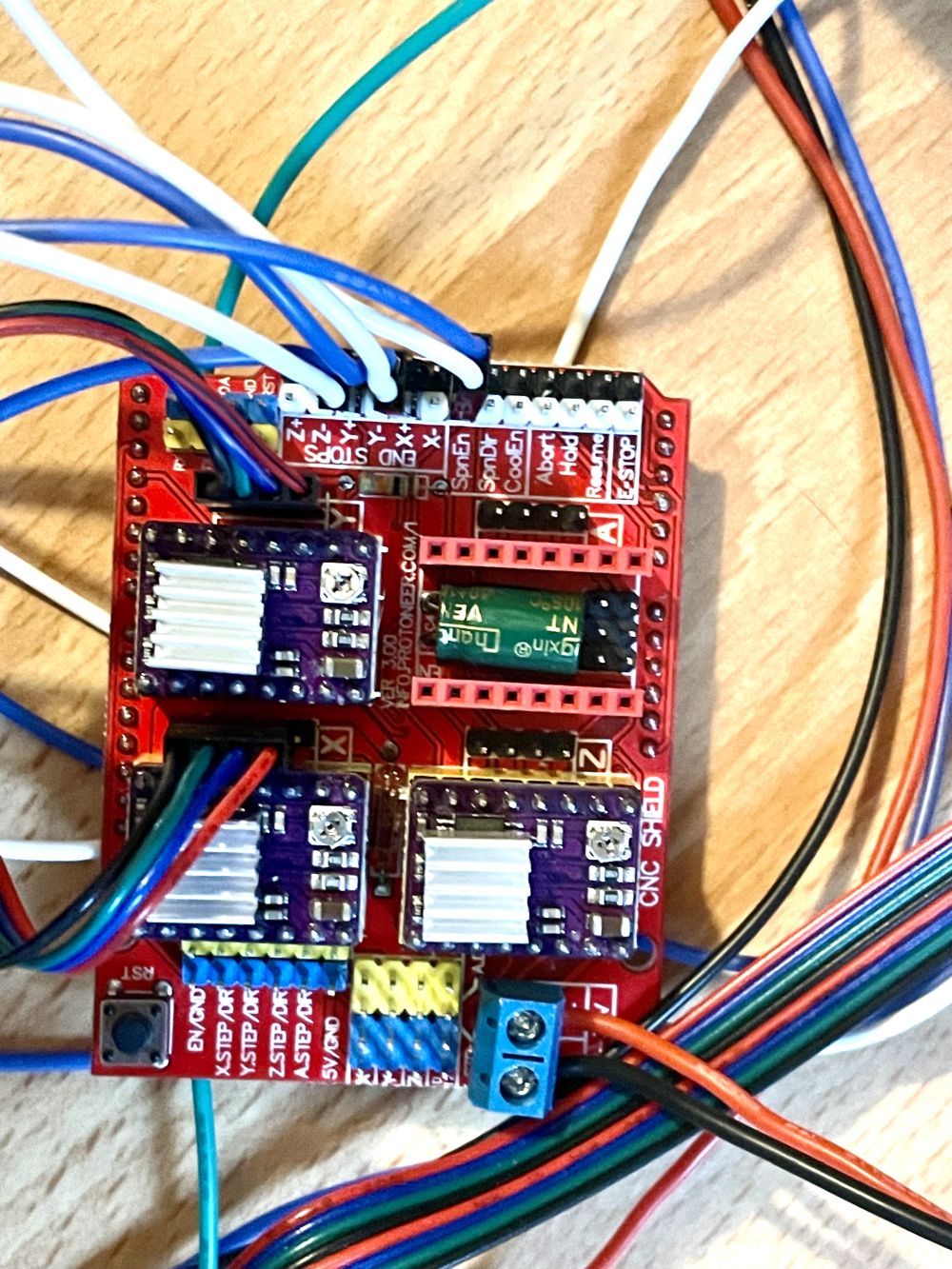
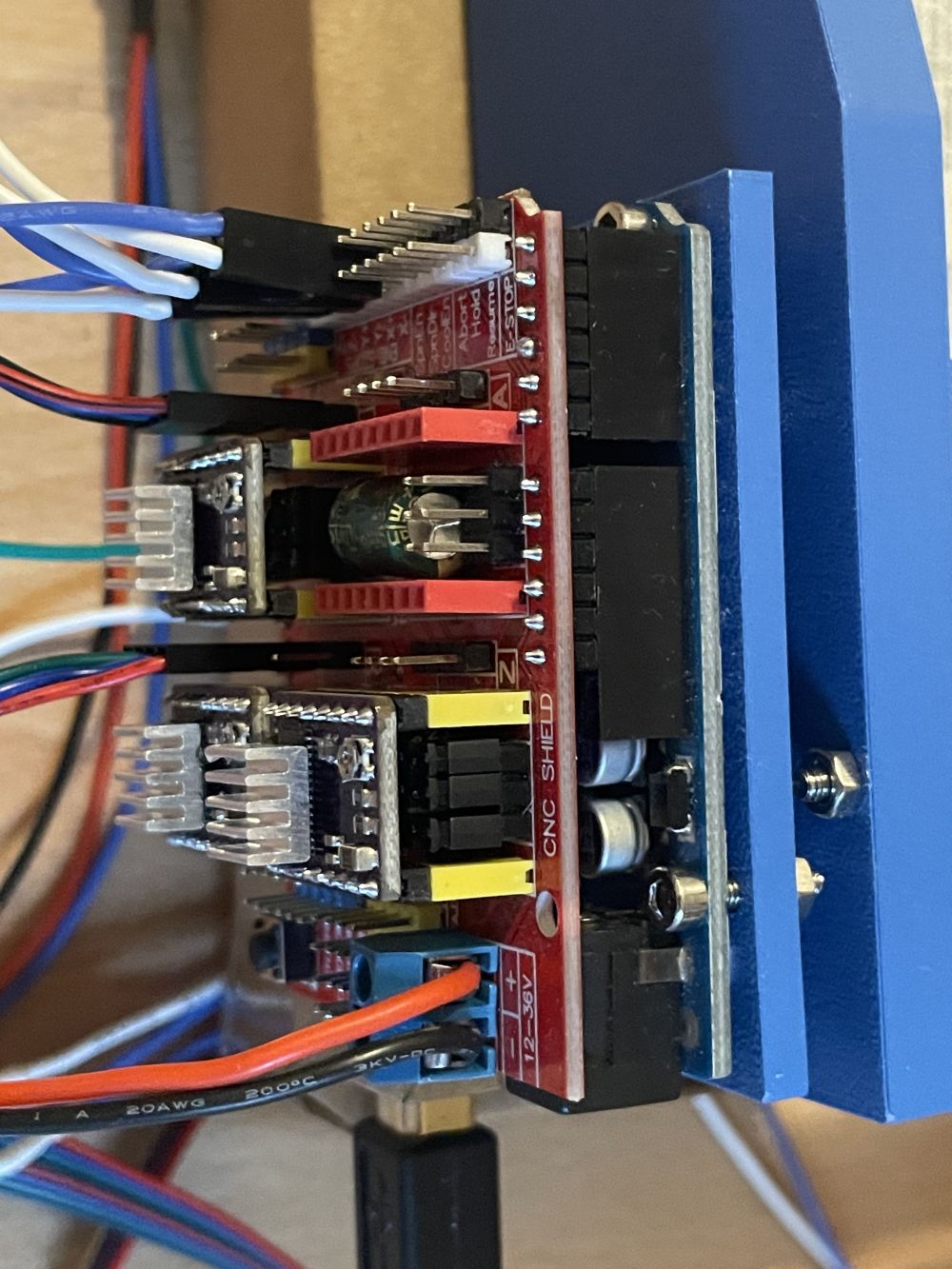
Wiring setup:
Exactly as in the link above but here are my photos (removed one of the motor connections for clarity):
Troubleshooting:
The good news is the firmware/software is loaded and communicating properly with GRBL software (Universal G-Code Sender and GRBL Plotter), and the limit switches are communicating correctly.
I understand this is not a CNC/GRBL forum so I’ll spare the details unless asked, but the one relevant point is I tried various parameter settings for the motors with no luck, including reversing the enable pin ($1=255, $4=0 or 1)
I checked voltages and they are as follows:
CNC board:
Power input terminals = 12 V
5V to GND = 4.7V
driver pins:
VMOT = 3.8 V
A1/A2 = 4.3 V
B1/B2 = 0 V
FAULT = 4.6 V
ENABLE = -0.1 V
RESET = 4.2 V
SLEEP = 4.2 V
STEP = -0.1 V
DIR = 12 V
VMOT to shield power input +ve = 12 V
Is the DIR @ 12V a problem? I thought that should be 5 V as it’s logic. I tested continuity (while OFF) between +ve CNC board terminal and driver DIR pin and get continuity (with and without Arduino connected).
B1/B2 being 0V was weird, but I'm getting a 2.5ohm resistance on the motor pins.
My first thought was that I actually need a 24V supply but before I take the brute force method I want to ask if there is a potential issue with the boards or wiring that is causing a potential voltage drop? I’ve read that 12V should actually be enough.
My second thought was to replace the CNC shield and maybe drivers and try again (and maybe also try the A4988 drivers but from what I read that shouldn’t be better). I had a fourth driver as a spare, but it gave the same readings.
I hope I covered everything. I couldn’t find any other posting with exactly this issue but did learn a lot about other sources of failure.
