Hallo,
hier im Forum kommt es ja immer wieder vor, dass für Projekte nach Steppermotoren gefragt wird, und welche geeignet sind. Dabei kommt dann auch häufig das Thema Stepper-Treiber mit Stromregelung auf.
Leider werden da oftmals falsche Ratschläge gegeben, die davon zeugen, dass die Prinzipien der Stromregelung nicht verstanden wurden. Dies führt dann beim Fragesteller im günstigsten Fall zu Verwirrung, im ungünstigsten zu falschen Entscheidungen.
Ich möchte deshalb hier versuchen, ein wenig Licht ins Dunkel der Stromregelung zu geben ( nur vereinfacht vom Prinzip her, ohne dabei auf die mathematischen Berechnungsgrundlagen einzugehen ). Ist zwar viel Stoff, aber vielleicht liest es ja doch jemand ![]()
Grundsätzlich ist das Prinzip der Stromregelung z.B. auch im Datenblatt des A4988 beschrieben. Zum Verständnis dieser Beschreibung werden allerdings elektrotechnische Grundlagen vorausgesetzt, die über das ohmsche Gesetzt doch deutlich hinausgehen. Dies betrifft vor allem das Verhalten von Induktivitäten und Kondensatoren, dass sich mit dem ohmschen Gesetz nicht beschreiben lässt. Ohne das Verständnis der Funktion dieser Bauteile lässt sich auch die Stromregelung bei Steppern nicht verstehen. Deshalb hier erstmal ein paar Erläuterungen zu diesen Bauteilen.
Im Gegensatz zu einem ohmschen Widerstand, der ein Verbraucher ist und elektrische Energie in Wärme umwandelt, sind Kondensatoren und Induktivitäten Speicher für elektrische Energie. D.h. sie können elektrische Energie aufnehmen und auch wieder abgeben.
Kondensatoren speichern die Energie in Form von elektrischer Ladung, Induktivitäten in einem magnetischen Feld. Das Verhältnis von Strom und Spannung bei diesen Bauteilen unterscheidet sich fundamental von den Verhältnissen bei einem ohmschen Widerstand. Fließt z.B. ein konstanter Strom in einen Kondensator, so steigt die Spannung über die Zeit kontinuierlich an. Umgekehrt gilt für eine Induktivität: Liegt eine konstante Spannung an, steigt der Strom kontinuierlich an. Dass dies nicht unendlich so geht, liegt nur daran, dass weder die Strom/Spannungsquelle, noch die realen Induktivitäten und Kapazitäten ideale Bauteile sind.
Für einen Kondensator gilt dabei: Der Strom ist der von aussen vorgegebene Wert, der sich auch sprunghaft ändern kann. Die Spannung ist der abgeleitete Wert, der von der im Kondensator gespeicherten Energie bestimmt wird, und sich deshalb nicht sprunghaft ändern kann.
Für eine Induktivität gilt: Die angelegte Spannung ist der von aussen vorgegebene Wert, der sich sprunghaft ändern kann, der Strom ist der abgeleitete Wert, der von der gespeicherten Energie abhängt, und sich dementsprechen nicht sprunghaft ändern kann.
N.B. Ein realer Kondensator ist i.d.R. wesentlich 'näher' am Ideal als eine reale Induktivität (Spule). Eine reale Induktivität kann man sich recht gut als eine Serienschaltung einer idealen Induktivität und eines ohmschen Widerstandes vortellen.
Wie funktioniert nun die Stromregelung in einem Schrittmotortreiber? Im Wesentlichen besteht der für jede Spule des Steppers aus einer H-Brücke und einer Schaltung zur Messung des Stromes, der von aussen durch die H-Brücke fließt. Ausserdem braucht es einen Pufferkondensator am Eingang des Treibers, der über das Netzteil geladen wird.
Hier ein Auszug aus dem A4988 Datenblatt:

Soll nun eine bestimmter Strom durch eine der Stepperspulen fließen, wird über die H-Brücke die Spule mit dem Pufferkondensator verbunden. An der Spule liegt nun die volle Kondensatorspannung an. Der Strom, der durch die Spule fließt steigt an. Letztendlich wird nun ein Teil der elektrischen Energie, die im Pufferkondensator gespeichert ist, in die Spule transferiert. Dieser Strom fließt auch durch den Strommeßshunt, und wenn der Spannungsabfall am Shunt den eingestellten Referenzwert erreicht, schaltet die H-Brücke ab.

Wie bereits geschrieben, kann der Strom durch die Spule aber nicht einfach abgeschaltet werden - er fließt auf jeden Fall weiter.
Hier kennen die Stromtreiber 2 Modi: 'Fast decay' and 'Slow decay'
Im Fast decay Modus, wird die H-Brücke so geschaltet, dass der Strom wieder zurück in den Pufferkondensator fließt.

Der äußere Stromfluß kehrt sich um - der Spannungsabfall am Shunt wird negativ und auch die Spannung an der Spule ändert ihr Vorzeichen. Die Spule ist jetzt ein Generator und ein Teil der eben vom Kondensator in die Spule transferierten Energie wird jetzt wieder zurück in den Kondensator gepumpt. Dies bewirkt ein rel. schnelles Absinken des Stroms ('fast decay'). Eine Strommessung ist nicht mehr möglich, weshalb dieser Modus zeitgesteuert geschaltet wird ( beim a4988 ca 10µs ).
Danach wird auf 'slow-decay' umgeschaltet. Dabei wird die Spule über die H-Brücke kurzgeschlossen.

Extern fließt in dieser Phase gar kein Strom mehr, der Spannuingsabfall am Shunt ist 0. Energie wird der Spule jetzt nur noch über die Verluste in ihrem ohmschen Widerstand, und gegebenenfalls (bei Bewegung) über die Magnetfelder im Motor entzogen. Der Strom sinkt jetzt nur noch langsamer. Aber auch diesen Strom kann der Treiber nicht messen, weshalb auch dieser Modus zeitgesteuert beendet wird.
Im nächsten Schritt wird nun die Energie in der Spule wieder aufgefüllt, indem wieder ein Stromfluß vom Kondensator zur Spule erzeugt wird und das Spielchen beginnt von vorn. Variabel an dem Ganzen ist die Aufladezeit. Denn die hängt davon ab, wie schnell der Abschaltwert des Stroms erreicht wird. Das wiederum hängt von der Spannung am Pufferkondensator, der Induktivität der Spule und der Energie, die der Spule durch die Bewegung und die ohmschen Verluste entzogen wird, ab.
Der 'Fast decay' Mode ist vor allem in der Phase wichtig, wenn der Strom in der Spule von Step zu Step sinken soll. Im Mixed-Decay Modus ( Standard bei den üblichen Treiberboards ) schalten die Treiber deshalb den 'Fast-Decay' Modus nur in diesen Phasen ein. Wenn der Strom von Step zu Step steigt, wird dann nur der 'slow-decay' Modus genutzt.
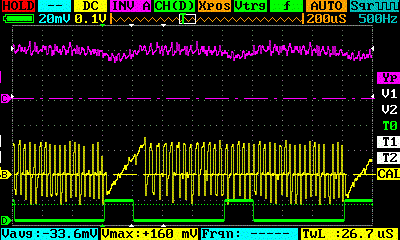
Man kann diese Phasen gut am Spannungsverlauf des Shunts und der Spule verfolgen:

Die grüne Liie ist der Spannungsverlauf an der Spule. Man erkennt, wie sich die Spannung schlagartig umpolt, wenn in den fast-decay Mode gewechselt wird.

Znu gleichen Zeitpunkt wechselt der Strom durch den Shunt das Vorzeichen.
Positiver Spannungsabfall während der 'Aufladephase', negativer Spannungsabfall während 'fast decay' und kein Spannungsabfall während 'slow decay'.
Hier erkennt man auch, weshalb Strom und Shunt so dimensioniert werden müssen, dass 0,5V am Shunt nicht überschritten werden: Der negative Spannungsabfall ist beim Umschalten genauso groß wie der positive. Wäre der nun größer als 0,5V, würde im 'fast decay' die parasitäre Substratdiode durchschalten, was den Treiber zerstören würde.
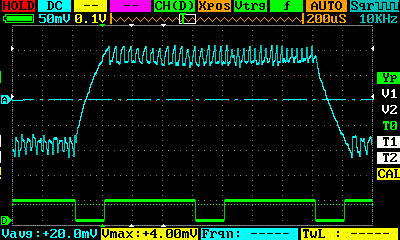
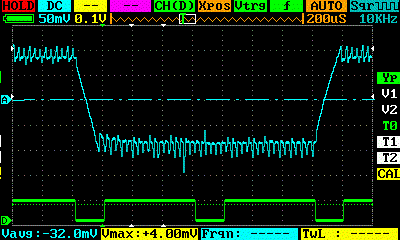
Die Messung des Spulenstroms ist problematischer, da es hier keinen festen Bezugspunkt gibt, Der Strom fließt hier aber ohne Unterbrechung immer in der gleichen Richtung ( im betrachteten Zeitraum, also ohne einen Step ).
Das Netzteil muss so dimensioniert sein, dass es die Energie-Entnahme aus dem Pufferkondensator im Mittel ausgleichen kann. Am Stromflußbild des shunts ist zu erkennen, dass dieser mittlere Strom wesentlich geringer ist, als die Stromspitzen in und aus dem Pufferkondensator.
Da die Spannung am Pufferkondensator durch die hin- und herfließende Energie prinzipiell etwas schwankt, ist hier ein spannungsmäßig 'hart' geregeltes Netzteil ungünstig. Da kommen sich Strom- und Spannungsregelung in die Quere. Viele werden aber diese rel. hochfrequenten Spannungsschwankungen eh nicht ausregeln können.