Hi all,
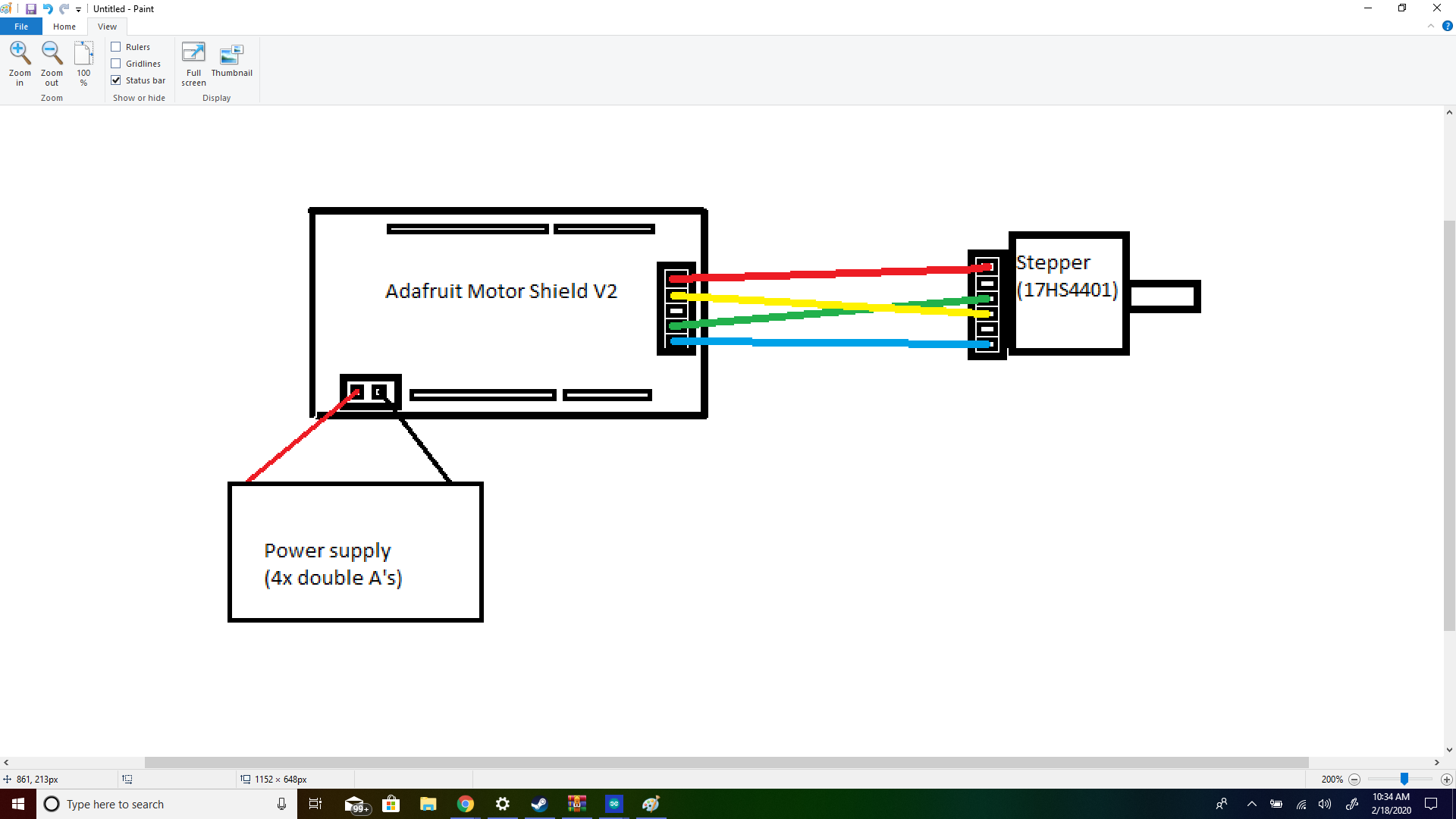
I'm using an Adafruit motor shield v2 and four double A's to try and get a stepper motor to work. I ran some of the adafruit example code just to get an idea of what could be wrong with it. I'll copy/paste that here. This is what happens when I run the code:
With the double steps, it turns fairly quickly but only in one direction (forward)
With interleave steps, it basically does the same thing as double, but slower and a bit more jittery
with microsteps, it just wiggles back and fourth slightly
with single steps, it basically just vibrates a little and doesn't turn at all.
I really don't know what's going on. I'm almost positive I've got everything wired correctly, and I've tried multiple stepper motors (albeit all of the same model).
Here's the code I'm using:
#include <Wire.h>
#include <Adafruit_MotorShield.h>
// Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// Or, create it with a different I2C address (say for stacking)
// Adafruit_MotorShield AFMS = Adafruit_MotorShield(0x61); -
// Connect a stepper motor with 200 steps per revolution (1.8 degree)
// to motor port #2 (M3 and M4)
Adafruit_StepperMotor *myMotor = AFMS.getStepper(200, 2);
void setup() {
Serial.begin(9600); // set up Serial library at 9600 bps
Serial.println("Stepper test!");
AFMS.begin(); // create with the default frequency 1.6KHz
//AFMS.begin(1000); // OR with a different frequency, say 1KHz
myMotor->setSpeed(10); // 10 rpm
}
void loop() {
Serial.println("Single coil steps");
myMotor->step(100, FORWARD, SINGLE);
myMotor->step(100, BACKWARD, SINGLE);
Serial.println("Double coil steps");
myMotor->step(100, FORWARD, DOUBLE);
myMotor->step(100, BACKWARD, DOUBLE);
Serial.println("Interleave coil steps");
myMotor->step(100, FORWARD, INTERLEAVE);
myMotor->step(100, BACKWARD, INTERLEAVE);
Serial.println("Microstep steps");
myMotor->step(50, FORWARD, MICROSTEP);
myMotor->step(50, BACKWARD, MICROSTEP);
}
Thank you!