Hello,
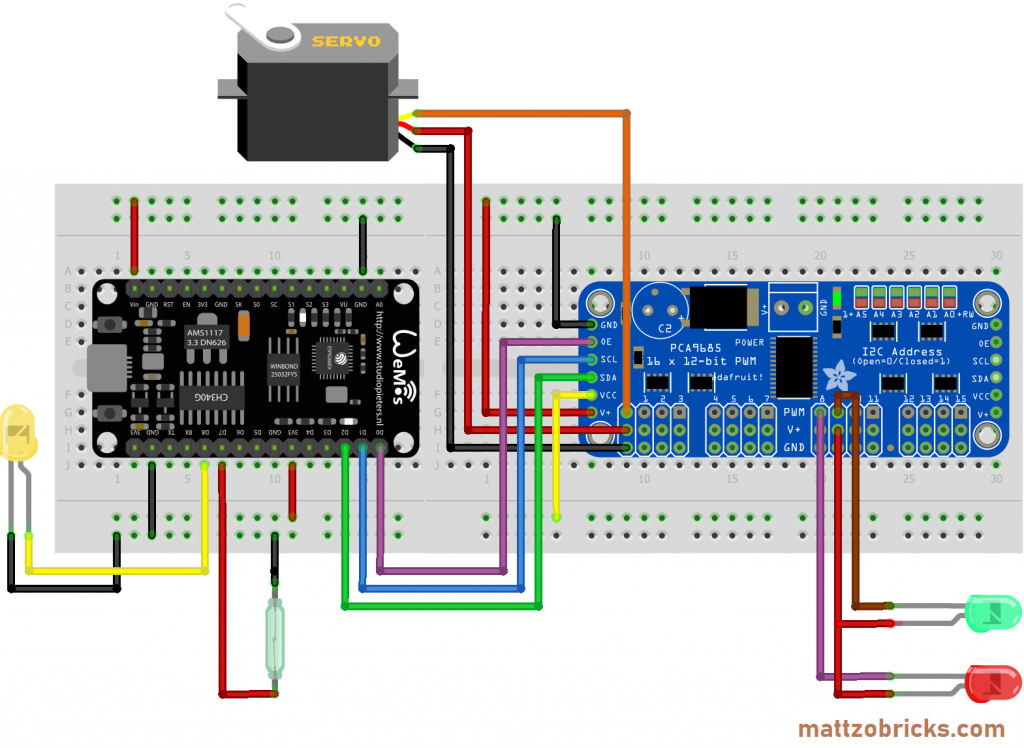
I want to use a ESP8266 to control with pca9685 multiple Servos.
I use this setup: https://mattzobricks.com/wp-content/uploads/2021/12/Wiring-Diagram-MLC-with-PCA9685-0.4_Steckplatine-1024x748.png
When I use this example code everything works:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define SERVOMIN 150 // This is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 600 // This is the 'maximum' pulse length count (out of 4096)
#define USMIN 600 // This is the rounded 'minimum' microsecond length based on the minimum pulse of 150
#define USMAX 2400 // This is the rounded 'maximum' microsecond length based on the maximum pulse of 600
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
uint8_t servonum = 1;
void setup() {
Serial.begin(9600);
Serial.println("8 channel Servo test!");
pwm.begin();
pwm.setOscillatorFrequency(27000000);
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
delay(10);
}
void loop() {
// Drive each servo one at a time using setPWM()
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
// Drive each servo one at a time using writeMicroseconds(), it's not precise due to calculation rounding!
// The writeMicroseconds() function is used to mimic the Arduino Servo library writeMicroseconds() behavior.
for (uint16_t microsec = USMIN; microsec < USMAX; microsec++) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
for (uint16_t microsec = USMAX; microsec > USMIN; microsec--) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
servonum++;
if (servonum > 7) servonum = 0; // Testing the first 8 servo channels
}
If I integrate the code into mine (see "void receive_packet()" In the area " if (DoCommand == "switch") {"), nothing happens. (Code from the example marked with "//vvTESTPROGRAM" and //^^TESTPROGRAM).
I control the ESP8266 with an app. For the lines "Serial.println(servonum);" something is also displayed in the serial monitor.
Does somebody has any idea?
// Frontend: VB-Projekt "VB NET NodeMCU UDP RS Test"
#include <ESP8266WiFi.h>
#include <WiFiUdp.h>
#include <ESP8266WebServer.h>
//vvTESTPROGRAMM
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
//^^TESTPROGRAMM
ADC_MODE(ADC_VCC); // Spannungsmessung
#include <espnow.h>
#include "credentials.h"
#define SERIAL_BAUDRATE 115200
#define ON_Board_LED 16 // Defining an On Board LED
#define led_built_in_ESP 2
#define UDP_PORT 2000
//vvTESTPROGRAMM
#define SERVOMIN 150 // This is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 600 // This is the 'maximum' pulse length count (out of 4096)
#define USMIN 600 // This is the rounded 'minimum' microsecond length based on the minimum pulse of 150
#define USMAX 2400 // This is the rounded 'maximum' microsecond length based on the maximum pulse of 600
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
uint8_t servonum = 1;
//^^TESTPROGRAMM
WiFiServer server(80); // Wir richten den Webserver auf Port 80 ein
ESP8266WebServer WebServer(80);
//-------UDP
//char reply[] = "Packet received!";
char packetBuffer[50];
unsigned int localPort = 2000;
WiFiUDP udp;
String strCon;
String SendValue;
//-------UDP
void wifiSetup() {
// Set WIFI module to STA mode
WiFi.mode(WIFI_STA);
// Connect
Serial.printf("[WIFI] Connecting to %s ", WIFI_SSID);
WiFi.begin(WIFI_SSID, WIFI_PASS);
// Wait
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
digitalWrite(ON_Board_LED, LOW);
delay(250);
digitalWrite(ON_Board_LED, HIGH);
delay(250);
}
Serial.println();
// Connected!
digitalWrite(ON_Board_LED, HIGH); //--> Turn off the On Board LED when it is connected to the wifi router.
Serial.printf("[WIFI] STATION Mode, SSID: %s, IP address: %s\n", WiFi.SSID().c_str(), WiFi.localIP().toString().c_str());
}
void setup() {
// Init serial port and clean garbage
Serial.begin(SERIAL_BAUDRATE);
Serial.println();
pinMode(ON_Board_LED,OUTPUT);
pinMode(led_built_in_ESP, OUTPUT);
digitalWrite(ON_Board_LED, HIGH); //--> Turn off Led On Board
digitalWrite(led_built_in_ESP, HIGH);
// Wifi
wifiSetup();
digitalWrite(led_built_in_ESP, HIGH);
udp.begin(localPort);
server.begin();
Serial.printf("Webserver gestartet, öffnen Sie %s in einem Webbrowser\n", WiFi.localIP().toString().c_str());
//vvTESTPROGRAMM
pwm.begin();
pwm.setOscillatorFrequency(27000000);
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
delay(10);
//^^TESTPROGRAMM
}
// Inhalt der Webseite generieren
String prepareHtmlPage()
{
String htmlPage =
String("HTTP/1.1 200 OK\r\n") +
"Content-Type: text/html\r\n" +
"Connection: close\r\n" + // Die Verbindung wird nach der Übertragung geschlossen
//"Refresh: 5\r\n" + // Automatisch alle 5 Sekunden neu laden
"\r\n" +
"<!DOCTYPE HTML>" +
"<html>" + SendValue + "</html>" +
"\r\n";
return htmlPage;
}
void loop()
{
AktWebsite();
receive_packet();
WebServer.handleClient();
}
void AktWebsite() {
WiFiClient client = server.available();
// warten auf Verbindung vom Client (Webbrowser)
if (client)
{
Serial.println("\n[Client hat sich verbunden]");
while (client.connected())
{
// zeilenweise einlesen was der Client (Webbrowser) anfragt
if (client.available())
{
String line = client.readStringUntil('\r');
Serial.print(line);
// bis zum Ende der Anfrage warten (=Leerzeile)
if (line.length() == 1 && line[0] == '\n')
{
SendValue = ReturnString();
client.println(prepareHtmlPage()); // Antwort ausgeben
break;
}
}
}
delay(1000); // dem Browser Zeit geben um die Antwort zu empfangen
// Die Verbindung schließen:
client.stop();
Serial.println("[Client getrennt]");
delay(10);
}
}
String ReturnString() {
String strRailroadControl = "RailroadControlModule";
String strRailroadControlType = "SwitchModule";
int Spannung = ESP.getVcc();
String strSpannung = String(Spannung);
unsigned int myChipId = ESP.getChipId();
String StrMyChipId = String(myChipId);
// [0]Identifikation als Komartibles Modul;[1]Art des Moduls;[2]Spannung;[3]Chip-ID
return strRailroadControl + ";" + strRailroadControlType + ";" + strSpannung + ";" + StrMyChipId;
}
String getValue(String data, char separator, int index)
{
int found = 0;
int strIndex[] = { 0, -1 };
int maxIndex = data.length() - 1;
for (int i = 0; i <= maxIndex && found <= index; i++) {
if (data.charAt(i) == separator || i == maxIndex) {
found++;
strIndex[0] = strIndex[1] + 1;
strIndex[1] = (i == maxIndex) ? i + 1 : i;
}
}
return found > index ? data.substring(strIndex[0], strIndex[1]) : "";
}
void receive_packet() {
int packetSize = udp.parsePacket();
if (packetSize) {
IPAddress remoteIp = udp.remoteIP();
int len = udp.read(packetBuffer, 255);
if (len > 0) packetBuffer[len] = 0;
strCon = packetBuffer;
// Serial.println(strCon); //Kommentierung rausnehmen zum testen
// Eingehenden String parsen in Befehl, Wert und ggf. Pin
String DoCommand = getValue(strCon, ';', 0);
int DoValue = getValue(strCon, ';', 1).toInt();
String DoServo = getValue(strCon, ';', 2);
Serial.println(DoValue);
// Komplexe Befehle (String Inhalt des Dateneingangs: BEFEHL(string);BEFEHLEWERT(int);PIN(string)
if (DoCommand == "switch") {
//vvTESTPROGRAMM
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
// Drive each servo one at a time using writeMicroseconds(), it's not precise due to calculation rounding!
// The writeMicroseconds() function is used to mimic the Arduino Servo library writeMicroseconds() behavior.
for (uint16_t microsec = USMIN; microsec < USMAX; microsec++) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
for (uint16_t microsec = USMAX; microsec > USMIN; microsec--) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
servonum++;
if (servonum > 7) servonum = 0; // Testing the first 8 servo channels
//^^TESTPROGRAMM
} else if (DoCommand=="SendStatus") { // Identifizierung als Node8266 beim IP-Scan im FE
// Send return packet
SendValue = ReturnString();
AktWebsite();
}
delay(1000); // Schutz um nicht alle gleichzeitig zu schalten.
}
}

{kind=link}