Hallo Arduino Freunde,
mein Schaltnetzteil macht schreckliche Geräusche. Es ist mein erstes Projekt mit einem Schaltnetzteil. Das Projekt habe ich nach diesem Guide aufgebaut und mein Netzteil LRS 50 24 Pieept wie verrückt, egal wie ich die Ausgangsspannung einstelle.
Kann mir jemand ein gescheite Alternative empfehlen oder liegt es vielleicht an der falschen Bedienung ?
@my_xy_projekt könnte es nicht sein, dass es bei Last zu schmelzen beginnt? @uwefed Schaltnetzteil auf 24V eingestellt alles Super. Das ich den Strom einstellen konnte am Treiber habe ich völlig vergessen. Dafür habe ich die Leitung getrennt die den Treiber versorgt, um den DMM in Reihe zu schalten. Kam kein Wert an und dann dachte ich mir messe ich doch einfach die 230V nochmal sicherheitshalber, was ist passiert ?!
Kurz zu meinem Projekt. Es soll ungefähr 15min in Betrieb genommen werden, um elektrisch die Babyschaukel anzutreiben. Dafür habe ich den Motortreiber TMC2209 wegen dem stallGuard4 (sensorlose Motorlasterkennung) und der Lautstärke ausgesucht.
Es ist ein ganz einfaches Projekt. Das Schaltnetzteil soll die komplette Schaltung versorgen. Der Arduino (UNO) wird noch von der USB Schnittstelle versorgt soll später von einem Abwärtswandler der Parallel zum Treiber geschaltet ist versorgt werden.
Der Nema Motor bewegt sich nicht wirklich großartig schnell, dennoch Fiept das Schaltnetzteil. Getrennt vom Treiber (Last) Fiept es nicht mehr.
[#include <TMCStepper.h> // TMCstepper - https://github.com/teemuatlut/TMCStepper
#include <SoftwareSerial.h> // Software serial for the UART to TMC2209 - https://www.arduino.cc/en/Reference/softwareSerial
#include <Streaming.h> // For serial debugging output - https://www.arduino.cc/reference/en/libraries/streaming/
#define EN_PIN 2 // Enable - PURPLE
#define DIR_PIN 3 // Direction - WHITE
#define STEP_PIN 4 // Step - ORANGE
#define SW_SCK 5 // Software Slave Clock (SCK) - BLUE
#define SW_TX 6 // SoftwareSerial receive pin - BROWN
#define SW_RX 7 // SoftwareSerial transmit pin - YELLOW
#define DRIVER_ADDRESS 0b00 // TMC2209 Driver address according to MS1 and MS2
#define R_SENSE 0.11f // SilentStepStick series use 0.11 ...and so does my fysetc TMC2209 (?)
SoftwareSerial SoftSerial(SW_RX, SW_TX); // Be sure to connect RX to TX and TX to RX between both devices
TMC2209Stepper TMCdriver(&SoftSerial, R_SENSE, DRIVER_ADDRESS); // Create TMC driver
int accel;
long maxSpeed;
int speedChangeDelay;
bool dir = false;
//== Setup ===============================================================================
void setup() {
Serial.begin(11520); // initialize hardware serial for debugging
SoftSerial.begin(11520); // initialize software serial for UART motor control
TMCdriver.beginSerial(11520); // Initialize UART
pinMode(EN_PIN, OUTPUT); // Set pinmodes
pinMode(STEP_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
digitalWrite(EN_PIN, LOW); // Enable TMC2209 board
TMCdriver.begin(); // UART: Init SW UART (if selected) with default 115200 baudrate
TMCdriver.toff(5); // Enables driver in software
TMCdriver.rms_current(500); // Set motor RMS current
TMCdriver.microsteps(256); // Set microsteps
TMCdriver.en_spreadCycle(false);
TMCdriver.pwm_autoscale(true); // Needed for stealthChop
}
//== Loop =================================================================================
void loop() {
accel = 10000; // Speed increase/decrease amount
maxSpeed = 50000; // Maximum speed to be reached
speedChangeDelay = 100; // Delay between speed changes
for (long i = 0; i <= maxSpeed; i = i + accel){ // Speed up to maxSpeed
TMCdriver.VACTUAL(i); // Set motor speed
Serial << TMCdriver.VACTUAL() << endl;
delay(100);
}
for (long i = maxSpeed; i >=0; i = i - accel){ // Decrease speed to zero
TMCdriver.VACTUAL(i);
Serial << TMCdriver.VACTUAL() << endl;
delay(100);
}
dir = !dir; // REVERSE DIRECTION
TMCdriver.shaft(dir); // SET DIRECTION
}]
Das sind merkwürdige ungewöhnliche Bitraten; sicher dass das so sein soll?
Ich spendiere für Serial hier noch eine 0.
SoftwareSerial kann 115200 eher nicht; bis 38400 habe ich selbst schon erfolgreich in Betrieb gehabt.
@my_xy_projekt Ja der Leitungsschutzschalter hat ausgelöst. Mir ist nur zum heulen, dass obwohl ich so penibel auf die Einstellungen vom DMM geachtet habe direkt ein Kurzschluss sich ergab. Das so ein kleines vorhaben wie Spannung messen zu einer Blendgranate entwickeln kann hat mich extrem überrascht.
@wno158 mir ging es zuerst um die richtige Beschaltung. Der Code wurde nicht von mir geschrieben hat aber alles gepasst. Die Bitraten hatte ich aber immer auf 115200 bei z.B. um Sensoren auszuwerten.
Diese Treiberplatinchen benötigen zwingend einen (Low ESR?) Stützkondensator. Zwingend!
(auch wenn da nur Empfohlen steht)
The motor supply pins VS should be decoupled with an electrolytic capacitor (47 μF or larger is
recommended) and a ceramic capacitor, placed close to the device.
Wenn man L Klemme mit Gehäuse sprich Erdung über die Meßspitze verbindet dann kann es schon zu Verdampfungen und Oxidaufschlag kommen.
Das Netzteil ist nicht unbedingt hinüber. Die Meßspitze schon.
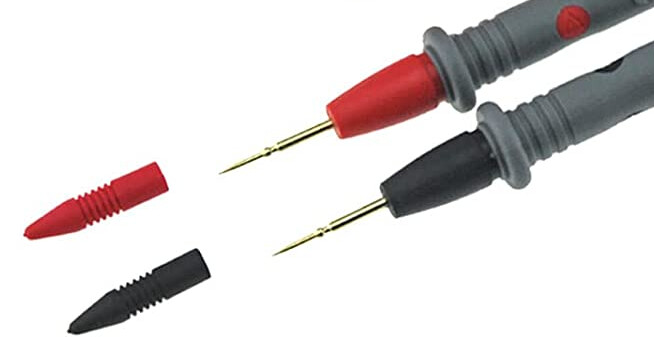
Einige Meßspitzen haben Kappen um den größten Teil der Mepspitze abdecken.
Kauf die CAT 3 Meßspitzen bzw solche mit Isolierkappen wie auf dem Foto. Da wäre das nicht passiert.
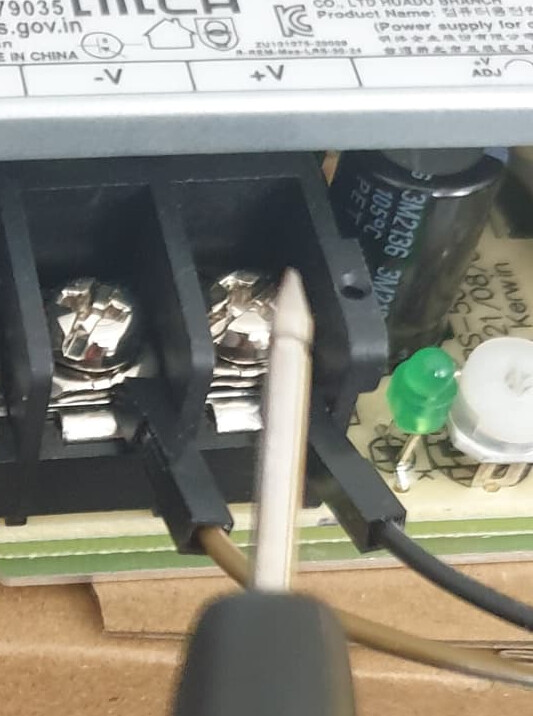
Da bin ich nicht sicher. Ich sehe laut Fotos daß der Meßbereich 600AC eingestellt ist und die Meßkabel richtig eingestöpselt, außerdem daß die Meßspitze die Schraube und das Gehäuse berührt hat. Und nicht daß ein Kurzschluß zwischen den beiden Meßspitzen zustandegekommen ist.
Jetzt wo Du es vergrößert hast .. mit der Spitze auf der Schraube und dann oben an die Kante angeschlagen. Die Kerbe hab ich übersehen.
Da passiert nichts.
Der FI bzw. LS gekommen und gut ist.
Die Spitzen haben sowas auch.. Der Rand unten ist verdächtig.... Muss nur drauf gemacht werden
Ich meine doch das ich im nachhinein an das Gehäuse rankam, als ich mich erschrocken habe. Das Schaltnetzteil habe ich jetzt wieder angeschlossen und siehe da der Treiber hat angefangen zu brennen. Bin jetzt bei einem Freund der mir ein neues Schaltnetzteil, Treiber und den Kondensator verkauft.
Was ich mich frage wieso das Netzteil so riesig ist, wenn die Handy Netzteile so winzig sind.
Das ist ein 50 W Netzteil. Ein Händy Netzteil hat 2,5 bis 5W (500mA bis 1A)
Da ist das Volumen des Netzteil schon was anderes. Außerdem ist so ein Blech-Netzteil nicht auf die kleinste Größe optimiert.
Bei Bosch ist braun Masse und schwarz auch mal plus.
Hymer macht blau als Masse und auch Schwarz als plus
Yamaha hat braun als plus und schwarz als Masse
Induktive Näherungssensoren haben z.B. blau Masse, Ausgang schwarz, braun plus
Leider kann ich keine einheitliche Farbgebung erkennen.
Ganz im Gegenteil.
In meiner Welt ist es bunt.
Es hat alles funktioniert den Kondensator habe ich jetzt integriert. Das Fiepen ist bei Last immer noch vorhanden. Die Ausgangsspannung vom Schaltnetzteil oder der Motorstrom ändern nichts daran. Die Spannung ist jetzt auf 24V und den Motorstrom kann ich erst mit den neuen Messleitungen/Prüfsonden messen. Dafür das ich es nur 1min in Betrieb genommen habe ist der Treiber deutlich warm geworden. Mache ich irgendeinen Fehler oder braucht es eine externe Kühlung?
Ich habe nun ein Arduino Nano gekauft um die dann im Projekt einzusetzen.
Mir fehlt nur noch ein Buck-Converter der mir die 24V in 5V umwandelt.
Gibt es vielleicht irgendwelche Empfehlungen für ein alternatives Netzteil und einem Abwärtswandler ?