Bonjour. Je suis étudiant en classe prépa scientifique et ai choisi comme sujet de TIPE (Travail d'Initiative Personnelle Encadré) le pilotage de mon télescope.
J'ai dans l'idée d'essayer de recréer un système GoTo amateur grâce à ma carte arduino et 2 moteurs déjà installés sur ma monture équatoriale (je suis encore novice dans le milieu donc n'hésitez pas à corriger mes éventuelles fautes de langage).
Mon problème est le suivant :
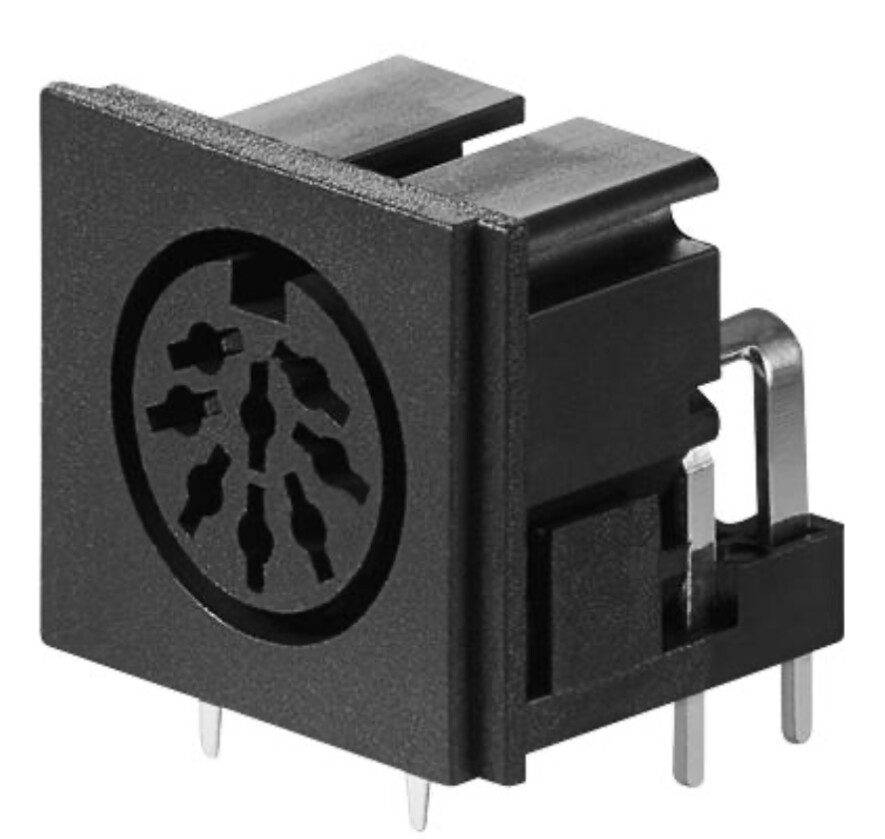
Sachant qu'ils fonctionnent avec des câbles DIN 8 broches, comment puis-je les relier à mon (futur) montage électronique.
Dois-je couper le câble pour en extraire les différents fils ?
Je plus sois, c'est quand même plus pratique de pouvoir débrancher les moteurs facilement, surtout si la carte électronique n'est pas collé/fixé sur le télescope ou la lunette.
Par contre normalement cela ne fait pas vraiment partie de l'instrument, c'est souvent un kit de motorisation.
J'ai aussi en projet de piloter le kit de motorisation de ma lunette, je vais donc suivre t'es avancé avec grand intérêt
Tout à fait d'accord, mais pour ça il faut une prise femelle et sur cette prise femelle, souder des fils à connecter au driver de moteur pas à pas, c'était le pourquoi de ma question:
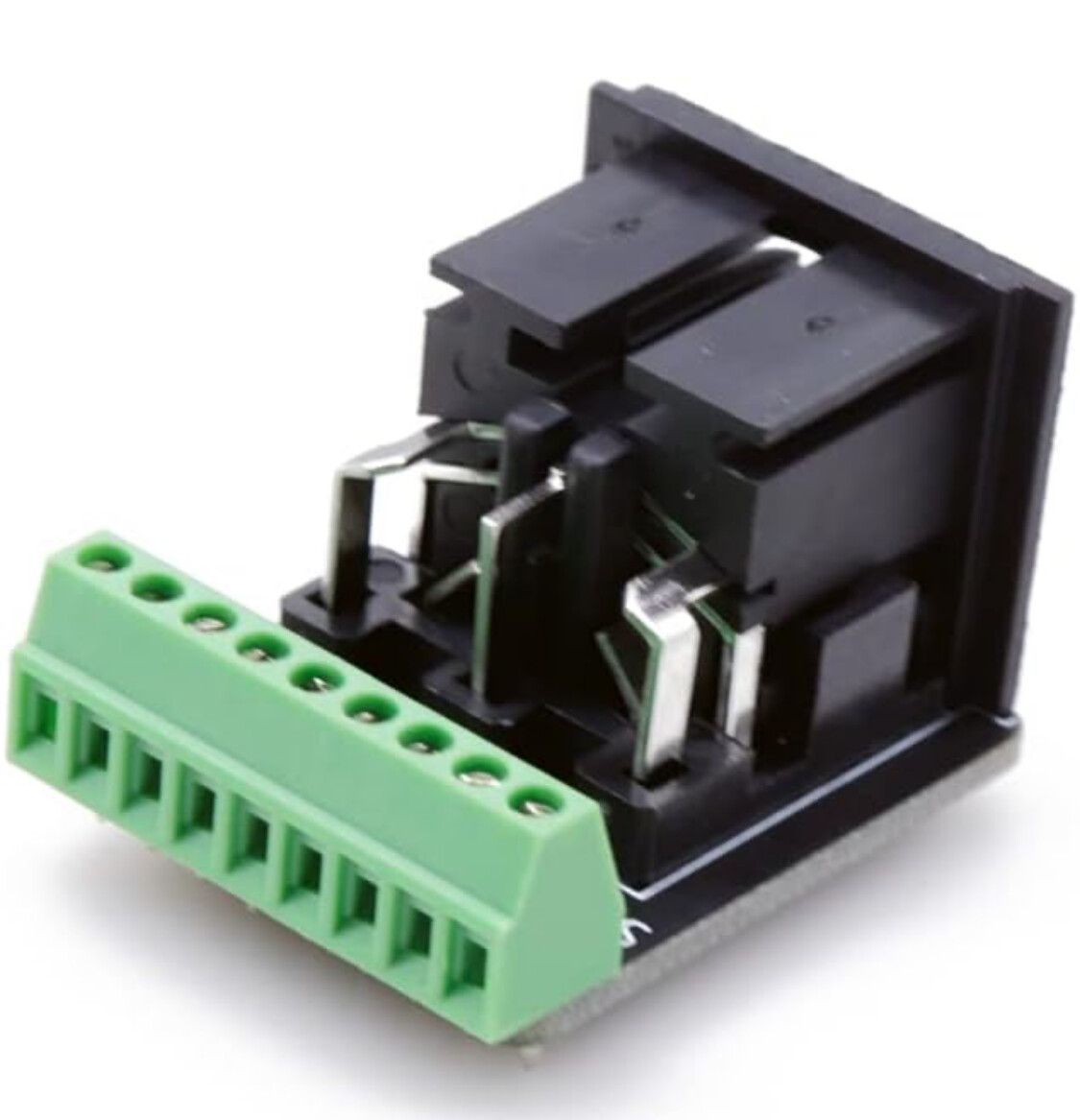
Oui il faut souder - pas forcément des fils directement- on trouve des embases avec des pins qu’on peut plus ou moins mettre sur une perfboard et souder
Rebonjour. Tout d’abord veuillez m'excuser pour mon absence. Quelques problèmes personnels ont mis le projet au point mort pendant quelques semaines. Mais je reprends du service et vous remercie pour votre sollicitude !
Concernant mes 2 moteurs, ce sont des nema 14. La référence la plus complète que j'ai pu trouver est celle-ci : Nema 14 Bipolaire 1.8deg 18Ncm(25.5oz.in) 0.8A 35x35x34mm 4 Fils
Aucune fiche technique ne m'a été transmise. Il me semble que je vais devoir identifier le rôle de chacun des fils avant d'espérer pouvoir faire tourner quelque-chose avec mon futur montage🤔
J'ai accès à des cartes arduino UNO mais ne possède pas de driver (j'ai d'ailleurs du mal à cerner pourquoi choisir tel ou tel driver).
Concernant mes compétences en soudure, j'ai paradoxalement déjà pratiqué sur de larges structures métalliques du secteur industriel mais jamais pour de petits éléments
Et donc tu connais l'essentiel : avant d'appliquer le fil de soudure, les pièces doivent être suffisamment chaudes.
Un tout petit peu de soudure sur la panne, juste pour favoriser le transfert thermique. La soudure appliquée sur la pièce, pas sur la panne, doit fondre sans toucher la panne.
Et pi c'est tout.
Fer mini 60 W, avec un fer de 40W tu te fais suer.
Température de la panne : je ne parle que pour moi : 390 °C
Je préfère aller très vite à 390 °C que passer du temps à 250°C.
Je pars du principe que si le temps est très court, seul le boitier chauffe et la température n'a pas le temps de monter au niveau des puces.
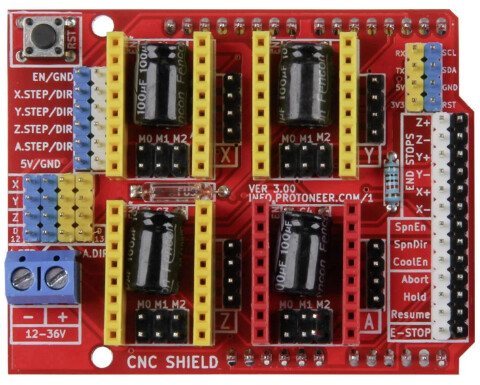
Oui, c'est du prêt à l'emploi.
Pour le brochage de ce shield qui est, à l'origine, pour des CNC sous GRBL, tu recherches GRBL pinout, ainsi tu pourra profiter de toutes les broches en bout de shield pour commander des accessoires ou lire des contacts et avoir le brochage des drivers des moteurs.